



Advanced
Cable Testing
CALCULO Y DISEÑO DE MAQUINAS ELECTRICAS
CAPITULO 7 - MOTOR MONOFASICO
Introducción
El motor asincrónico trifásico gira arrastrado por el campo rotante que tiene origen en las corrientes de fase.
Cuando se interrumpe una fase el motor sigue en rotación, aunque su característica par velocidad cae notablemente.
Absorbe entonces mayor corriente, para poder entregar la potencia requerida por la carga, y puede llegar a dañarse si no actúan las protecciones.
Si se carga el motor, alimentado con dos fases podrá entregar una potencia sensiblemente reducida en comparación a sus dimensiones (que corresponden al motor trifásico).
Si el motor está detenido y se lo alimenta con sólo dos fases, no arrancará, es necesario hacerlo girar mediante un impulso para iniciar el movimiento.
Un sistema monofásico puede alimentar un motor a inducción bifásico, cuyos arrollamientos son de distinta impedancia, una vez que el motor gira puede desconectarse uno de los arrollamientos que se lo considera de arranque.
Los motores monofásicos a inducción, muy utilizados en el campo de pequeñas potencias, presentan respecto a los motores universales con colector, algunas ventajas como por ejemplo, son constructivamente más simples, no tienen colector que como se sabe es un órgano particularmente delicado, tienen una marcha silenciosa, no provocan disturbios en las comunicaciones (que de alguna manera son inevitables en los motores con colector); en cambio requieren dispositivos auxiliares para poder arrancar.
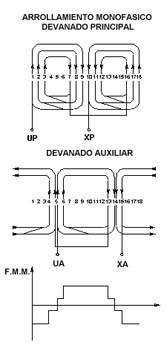
Todos los artificios para hacer que este motor pueda arrancar se fundan en el principio de crear un campo rotante, por medio de un arrollamiento auxiliar (o de arranque), que produzca un flujo fuertemente desfasado en el espacio y en el tiempo respecto del principal, y que al componerse dan el campo rotante.
El arrollamiento de arranque se dispone en cuadratura respecto del arrollamiento principal (o de trabajo), y se desconecta automáticamente cuando se produce el arranque o más precisamente cuando la velocidad del motor alcanza un valor próximo a 0.75 - 0.80 de la velocidad de sincronismo; la desconexión se realiza con dispositivos que son accionados por la fuerza centrífuga o más recientemente por medio de un relé temporizado por accionamiento electrónico.
Para producir el desplazamiento temporal entre la corriente del circuito auxiliar y la del circuito principal se pueden utilizar distintas soluciones, estas consisten en poner en serie con el devanado auxiliar una resistencia, una inductancia o bien una capacidad.
El par de arranque desarrollado es fuertemente dependiente de la solución que se adopta, por ejemplo en motores con arrollamiento auxiliar con resistencia alcanza o supera muy poco el par nominal, en cambio en motores con devanado auxiliar con capacitor el par de arranque puede superar varias veces el nominal.
También hay motores que tienen en el devanado auxiliar un capacitor y que tanto el devanado principal como el auxiliar permanecen conectados permanentemente tanto en el arranque como durante la marcha normal.
Si nos referimos a su principio de funcionamiento se trata en rigor de un motor bifásico, pero por estar alimentado monofásicamente, se lo considera monofásico.
Los motores monofásicos se diseñan normalmente para satisfacer un conjunto de especificaciones algunas de las cuales están impuestas por la carga, otras por el ambiente eléctrico donde serán utilizados, y otras en cambio por el fabricante.
El objetivo de este trabajo es proponer un método de cálculo y de diseño de motores para uso general en el mercado, con un amplio margen de aplicaciones, y que satisfagan las distintas normas utilizadas en la industria.
Son aplicables básicamente los conceptos de diseño y construcción explicados para los motores asincrónicos trifásicos, la diferencia esencial consiste en que se deben realizar dos arrollamientos y encontrar la mejor combinación de ambos que satisfaga los requerimientos impuestos, la propuesta final del método se ha realizado con un programa de computadora que guía al proyectista en la elección de los parámetros y presenta los resultados del cálculo a medida que este avanza.
Los programas de cálculo pueden ser de tipo interactivo o batch (de horneada, de una vez) para esta máquina el desarrollo se comenzó con un proyecto interactivo, pero finalmente volvimos a un programa batch (como para las otras máquinas), que permite ver todas las consecuencias de cada adopción hecha, creímos más adecuada esta forma para hacer la experiencia didáctica.
Son tantas las variables involucradas en el diseño que resulta imposible incorporar todas ellas en simples ecuaciones, en consecuencia para alcanzar el mejor diseño se debe utilizar el método de aproximaciones sucesivas ya visto para otras máquinas, una vez más un programa de computadora encuentra aquí su plena vigencia.
Criterios de dimensionamiento
En este trabajo se explica una metodología de cálculo en base a la cual se desarrolló un programa que permite rápidamente obtener los resultados necesarios para poder evaluar el diseño.
En la bibliografía se pueden encontrar distintos métodos que permiten determinar el volumen de material activo de un motor, teniendo en cuenta además de la potencia y la frecuencia de la alimentación, las características del motor, el tipo de arranque, y el número de polos.
Si se trata de encarar el desarrollo de una nueva serie de motores se justifica el diseño completo del núcleo, en cambio para el caso de tener que fabricar un reducido número de motores puede resultar conveniente utilizar una laminación ya disponible.
Existen en el mercado laminaciones ya troqueladas para estatores y rotores de motores de inducción que dentro de una gama de valores de diámetro externo, diámetro interno, altura de corona, número de ranuras, tipo de ranura y sección, diámetro del eje, permiten al proyectista elegir aquella que se ajuste mejor a su proyecto.
Como es fácil comprender entran aquí en juego aspectos económicos que condicionan el diseño, y que deberán ser evaluados en cada caso particular.
Es conveniente que el corte y el punzonado se realicen con gran precisión y mediante dispositivos y matrices bien afilados, de manera de evitar rebabas, que tienen incidencia tanto en el rendimiento como en el calentamiento, como así también lograr un bajo nivel de ruido, propiedad ésta que para motores pequeños adquiere una importancia preponderante.
Para ello es necesario asegurarse que el montaje de los núcleos sea realizado adecuadamente, es decir, bien compactados y fijados.
Datos iniciales
Para explicar la metodología de cálculo, que se hace ejecutando el programa MOTMON, se siguen los pasos que se han definido en el desarrollo del mismo.
El ingreso de datos se hace por grupos, asociados en registros, el primer registro se utiliza para identificar con un título la corrida.
El primer paso inicia con el ingreso del segundo registro que incluye los siguientes datos:
- POT: potencia del motor (kW)
- UU1: tensión de alimentación (V)
- F0: frecuencia (Hz)
- MCERR: tipo de protección mecánica
- NPOL: número de polos
- COFI: factor de potencia
- REND: rendimiento (%)
Algunos datos pueden ser nulos, y en ese caso el programa propone un valor de ejemplo, o correspondiente al progreso del cálculo.
Se verifica el número de polos que debe ser par, dos o más, se determina la corriente absorbida en base a la potencia, tensión, factor de potencia y rendimiento, el último par de valores se obtiene como resultado al final del calculo, el ingreso de estos es una estimación que se debe comprobar acertada.
Se determina la velocidad sincrónica en base a la frecuencia y el número de polos.
El tercer registro incluye los siguiente datos:
- DIAM1: diámetro interno del estator (mm)
- HLX1: largo del paquete (mm)
- relleno (dato nulo, en este programa frecuentemente hemos dejado un lugar para que la
- posición relativa de los datos se mantenga en correspondencia con los otros programas)
- QQ1: número de ranuras estatóricas
- BD: inducción en los dientes (T)
- relleno (dato nulo)
- FAP1: factor de apilado del estator
Si el diámetro no se ha impuesto se adopta el diámetro interno del estator en función del número de polos:
| Polos | DIAM1 (mm) |
| 2 | 75 |
| 4 | 90 |
| 6 | 100 |
| 8 | 110 |
y se determina el paso polar TAUP = p ´ DIAM1/NPOL.
Para este tipo de máquinas la relación HLX1/TAUP resulta próxima a1, se adopta este valor y se obtiene el largo del paquete.
Se verifica el número de ranuras del estator, el número de ranuras por polo debe estar comprendido entre 4 y12.
Elección del número de ranuras estatóricas
La única restricción que debe observarse para elegir el número de ranuras estatóricas de un motor monofásico es que sea divisible por el número de polos, para que se pueda utilizar un devanado a estrato único equilibrado y regular, (formado por grupos de bobinas todas iguales).
En los arrollamientos monofásicos no conviene utilizar para el devanado principal todas las ranuras, fundamentalmente el número de ranuras utilizadas resulta próximo a 2/3 de las ranuras totales, siendo siempre el número de ranuras por polo igual a un entero. Las ranuras por polo deben estar entre 4 y12.
Obsérvese que cuanto más ranuras se utilizan de las disponibles, el grupo de bobinas se extiende en un ángulo eléctrico de180º y resulta menor el valor del factor de distribución para la fundamental.
Si en cambio, como resulta para un proyecto más racional, el grupo de bobinas se extiende en un ángulo de120º, el factor de distribución aumenta.
Cuando en cambio se quiere adoptar para un motor monofásico las partes magnéticas y mecánicas de un motor trifásico, se reservan para el arrollamiento principal 2/3 de las ranuras (aquellas que para un devanado trifásico estarían ocupadas por los arrollamientos de 2 fases), utilizando el resto1/3 de ranuras para el devanado de arranque (aquellas de la tercera fase).
En los arrollamientos a único estrato se prefieren las bobinas concéntricas, que tienen un paso distinto cada una de ellas.
En la tabla 7.1 se indican valores recomendados de ranuras en función del número de polos.
Tabla 7.1 - Relación entre número de ranuras estatóricas y polos
| Polos | Número de ranuras estatóricas | |||||||||||
| 2 | 6 | 12 | 18 | 24 | 30 | 36 | 42 | 48 | 54 | 60 | 66 | 72 |
| 4 | 12 | 24 | 36 | 48 | 60 | 72 | ||||||
| 6 | 18 | 36 | 54 | 72 | ||||||||
| 8 | 24 | 48 | 72 | |||||||||
Un número grande de ranuras reduce la reactancia de dispersión (de ranura y zig-zag), en consecuencia se tiene un par de arranque mayor, mejora el rendimiento y el factor de potencia, es decir, para un dado volumen del paquete magnético se tiene una potencia útil mayor.
Se reducen también los problemas originados por los campos armónicos, pero empeora el factor de aprovechamiento de la ranura.
Si el número de ranuras no se impone se adoptan de la tabla 7.1 los siguientes valores:
| Polos: | 2 | 4 | 6 | 8 |
| Ranuras estatóricas: | 24 | 36 | 36 | 48 |
El cuarto registro incluye los siguientes datos:
- DEXT: diámetro exterior (mm)
- DEJE: diámetro del eje en el paquete (mm)
- DC: diámetro del eje en el cojinete (mm)
Si el diámetro exterior no se ha impuesto se lo adopta en función del número de polos de acuerdo con las relaciones propuestas por P. H. Trickey ver bibliografía [1]:
| Polos | DIAM1/DEXT |
| 2 | 0.50 |
| 4 | 0.59 |
| 6 | 0.64 |
| 8 | 0.667 |
El quinto registro:
- DELTA: entrehierro (mm)
- relleno (dato nulo)
- NVIAS: número de vías de corriente
- DENC1:densidad de corriente (A/mm²)
- COEAP: coeficiente de aprovechamiento
- RHO1: resistividad (ohm´ mm²/m)
- DCOND1: peso especifico (kg/dm3)
- CIV: caída inductiva (%)
Determinación del entrehierro
La determinación del entrehierro es de fundamental importancia en el diseño de un motor de inducción, incidiendo en forma notable en las características mecánicas y eléctricas del mismo.
Para motores monofásicos se puede fijar el valor del entrehierro con la siguiente expresión empírica con buenos resultados en la práctica:
 mm
mm
siendo:
- DIAM1: diámetro al entrehierro (mm)
- NPOL: número de polos
Es aconsejable realizar cálculos con dos o tres entrehierros distintos y evaluar su incidencia en las características funcionales, para obtener el mejor valor para cada caso en particular.
Como se ha visto al tratar las máquinas asincrónicas trifásicas, cuanto más grande es el entrehierro mayor es la corriente de magnetización y consecuentemente las pérdidas, resultando esto más importante para el caso de motores monofásicos que en el caso de motores polifásicos.
Al aumentar el entrehierro se reducen los efectos producidos por las pulsaciones de flujo en los extremos de los dientes estatóricos y rotóricos, y consecuentemente las pérdidas superficiales, se tiene también una reducción del ruido de origen magnético producido por estas pulsaciones.
También la reactancia de dispersión disminuye con el aumento del entrehierro debido a la incidencia que tiene en las reactancias de dispersión zig-zag, diferencial y de hélice, incrementándose en consecuencia el par de arranque y la corriente de arranque.
Al aumentar el entrehierro se tiene una disminución del factor de potencia y del rendimiento, siendo este efecto más pronunciado cuanto mayor es el número de polos.
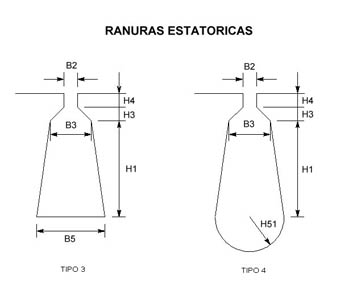
Elección del tipo de ranuras estatóricas
Inicia el segundo paso con la lectura del sexto registro que incluye los siguientes datos:
- TIPO: tipo de ranura del estator
- BB2: ancho entrada (mm)
- BB1: ancho en entrehierro (mm)
- HH4: altura entrada (mm)
- HH3: altura cuña o trapecio superior (mm)
- HH2: altura aislación superior (mm)
- EA: espesor aislación (mm)
y el séptimo registro:
- relleno (dato nulo)
- SN1: sección útil ranura (mm²)
- HH6: profundidad ranura (mm)
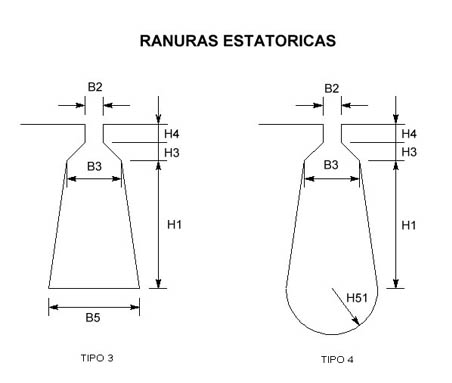
Para estos motores las ranuras que normalmente se utilizan son la trapezoidal con fondo plano (tipo 3) y la trapezoidal con fondo circular (tipo 4).
Las distintas dimensiones que definen su geometría y que utiliza el programa se indican en la figura 416.
Si se han ingresado datos nulos una rutina determina valores para el ancho de entrada del diente (BB2) y el ancho del diente (T1)
- Q1 £ 24 BB2 = 25.4´ 0.027 + 0.175´ DIAM1
- Q1 £ 36 BB2 = 25.4´ 0.015 + 0.175´ DIAM1
- Q1 £ 48 BB2 = 0.175´ DIAM1
- NPOL = 2 T1 = (27.94 + 0.08 ´ DIAM1)´ DIAM1 / (Q1´ 25.4)
- NPOL > 2 T1 = (32.258 + 0.09 ´ DIAM1)´ DIAM1 / (Q1´ 25.4)
y se determina el ancho de ranura en el entrehierro BB1 = TAUC1 - T1.
Si la profundidad de la ranura HH6 es nula se determina la altura de la corona
siendo1.15 el valor adecuado para la relación entre el valor de la inducción en el diente y en la corona, se obtiene la altura del diente HH6.
Para máquinas sincrónicas y asincrónicas trifásicas, las ranuras tienen todas el mismo grado de ocupación, esta situación no se presenta en los motores monofásicos, donde el grado de llenado depende de su disposición, no es posible en este momento determinar el espacio que pueden ocupar los conductores dentro de las ranuras, para eso es necesario haber avanzado en la definición de los bobinados de marcha y de arranque.
El coeficiente de aprovechamiento COEAP tiene en cuenta la aislación entre espiras (esmalte del conductor) y el espacio que queda entre conductores (función del diámetro del conductor).
De todos modos, en estas máquinas no es importante un aprovechamiento ajustado de la ranura, su desaprovechamiento no trae consecuencias económicas de importancia, como sería el caso de grandes máquinas trifásicas.
Es entonces necesario definir en detalle las dimensiones de la ranura en este momento, o al menos definir el tamaño que se considera necesario.
Se han previsto dos alternativas para el cálculo de las ranuras tanto estatóricas como rotóricas. En el primer caso se deben ingresar todas las dimensiones y se obtiene como resultado el área de las ranuras; en el segundo caso en cambio se ingresa como dato el área SN1 (área neta disponible para el devanado que se obtiene descontando la parte de entrada del diente y las secciones de las aislaciones contra masa y del interestrato) y se obtiene la geometría correspondiente a la forma de la ranura adoptada.
Se completan las dimensiones y se determina el área del diente y de la ranura, se fija un valor conveniente de inducción BD en los dientes estatóricos, en base a los valores que se indican en la tabla 7.3.
Tabla 7.3 - Valores de inducción recomendados
| Características del arranque | 60 Hz | 50 Hz | 25 Hz |
| Motores fraccionarios con par normal | 1.32 T | 1.47 T | 1.63 T |
| Motores fraccionarios con par alto | 1.70 T | 1.78 T | 1.86 T |
Estos mismos valores son utilizados por otra rutina que ayuda a adoptar la inducción BD en los dientes, si no ha sido impuesto como dato.
El octavo registro incluye los siguientes datos:
- relleno (dato nulo)
- QQ2: número de ranuras rotóricas
- relleno (dato nulo)
- DENC2: densidad de corriente (A/mm²)
- COEAP2: coeficiente de aprovechamiento
- RHO2: resistividad de la barra y anillo (ohm´ mm²/m)
- DCOND2: peso especifico (kg/dm3)
Elección del número de ranuras rotóricas
Conocido el entrehierro se determina el diámetro del rotor, y como normalmente el punzonado del rotor se hace aprovechando la misma laminación que se utiliza para el estator, su longitud es la misma que la del estator.
Se puede afirmar que las dificultades que se presentan para elegir el número de ranuras rotóricas, son notables, esto esta evidenciado por la abundante literatura que trata de la elección, y que pone en evidencia la diferencia de opiniones entre los distintos autores acerca de cómo elegir el número de ranuras y que llegan a proponer condiciones que son contrastantes.
Se mencionan a continuación algunas reglas que ayudan a adoptar el número de ranuras, en primer lugar para minimizar las reactancias de ranura y zig-zag es conveniente que el número de ranuras rotóricas sea mayor que el de ranuras estatóricas.
Para tener máquinas silenciosas es conveniente que el número de ranuras rotóricas difiera del número de ranuras estatóricas en un 20% o más.
Pero para reducir las pérdidas adicionales en carga es conveniente que el número de ranuras rotóricas sea del orden del15% menor que las estatóricas (regla que se opone a lo enunciado primero), en consecuencia su elección debe contemplar estos aspectos que condicionan su funcionamiento, orientándose en un sentido u otro según se pretende un resultado u otro.
Para que no se presenten cúspides en la característica mecánica, se deben evitar ciertas combinaciones de número de ranuras estatóricas y rotóricas, siendo aplicables aquí los mismos conceptos ya vistos para la máquina asincrónica trifásica (ver Capítulo 5 punto 5.24 pares parásitos sincrónicos).
La tabla 7.2 indica distintas combinaciones válidas de número de ranuras estatóricas y rotóricas [2].
Tabla 7.2 - Ranuras rotóricas (Q2) en función del número de polos, y del número de ranuras estatóricas (Q1)
| Número de polos | ||||||||||||||||||||
| Q1 | 2 | 4 | 6 | 8 | ||||||||||||||||
| 12 | 17 | 18 | 28 | 28 | 28 | |||||||||||||||
| 16 | 11 | 19 | ||||||||||||||||||
| 18 | 23 | |||||||||||||||||||
| 24 | 17 | 18 | 29 | 33 | 36 | 17 | 20 | 31 | 34 | 35 | 18 | 23 | 34 | 17 | 30 | |||||
| 30 | 45 | |||||||||||||||||||
| 32 | 25 | 38 | 38 | 44 | 26 | 39 | 41 | |||||||||||||
| 36 | 28 | 31 | 45 | 46 | 47 | 28 | 30 | 44 | 45 | 48 | 24 | 27 | 33 | 42 | 47 | |||||
| 48 | 38 | 57 | 40 | 57 | 62 | 36 | 57 | 60 | 62 | 62 | 64 | |||||||||
Si el número de ranuras no se impone el programa adopta el entero que se obtiene incrementando en un 20 % el número de ranuras del estator, es necesario que en sucesivos ajustes del cálculo se adopte un valor compatible con la tabla 7.2.
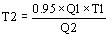
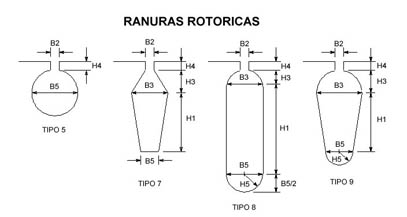
Elección del tipo de ranuras rotóricas
El noveno registro incluye los siguientes datos:
- TIPO: tipo de ranura del rotor
- BB2: ancho entrada (mm)
- BB1: ancho en entrehierro (mm)
- HH4: altura entrada (mm)
- HH3: altura cuña o trapecio superior (mm)
- HH2: altura aislación superior (mm)
- ARAN: ranura (0) cerrada (1) abierta
y el décimo registro:
- relleno (dato nulo)
- SRB2: sección ranura (mm²)
- HH6: profundidad ranura (mm)
- relleno (dato nulo)
- FACR: factor aprovechamiento corona rotor
Si se han ingresado datos nulos y la ranura es abierta ARAN =1 una rutina determina el ancho de entrada del diente (BB2 = 0.8) y el ancho del diente (T2)
y se determina el ancho de ranura en el entrehierro BB1 = TAUC2 - T2.
Si se han ingresado datos nulos se determina la sección de la ranura haciendo SN2 = 0.29 ´ SN1 (se recuerda que es deseable una alta resistencia del rotor, desde el punto de vista del par de arranque y corriente, pero esto lleva a un alto resbalamiento), la relación adoptada se encuentra dentro de valores aceptables.
Se pueden encontrar motores monofásicos de potencia fraccionaria con diversos tipos de ranuras rotóricas, en este trabajo se considera suficiente la utilización de la ranura circular (tipo 5), trapezoidal (tipo 7), la ranura de caras paralelas (tipo 8) y la ojiva (tipo 9), las dos últimas se realizan con ángulos fuertemente redondeados para facilitar la colada del aluminio.
Como ya visto para máquinas trifásicas, el proceso más utilizado en la actualidad para la fabricación de los rotores es la técnica de fundición inyectada.
La figura 417 muestra las distintas dimensiones que definen su geometría y que utiliza el programa.
Cálculo del devanado principal o de trabajo
Conocidas todas las dimensiones del paquete estatórico y rotórico incluyendo el número de ranuras, tipo y sus dimensiones, el tercer paso consiste en determinar el devanado principal.
Se calculan las secciones de los dientes del estator y del rotor por polo, la sección de la corona del estator y del rotor y los correspondientes pesos.
Suponiendo que el flujo debajo de un polo tiene una distribución sinusoidal con su valor máximo en el centro del polo, y adoptando un valor máximo de inducción en los dientes, el flujo por polo resulta:
 (Wb)
(Wb)
siendo:
SDP: sección dientes por polo (mm²)
BD: inducción en los dientes (T)
Se ingresan más datos, que definen el arrollamiento:
El onceavo registro incluye los siguientes datos:
NXP: número de ranuras que contienen el arrollamiento
CIP: factor distribución para la mitad de las ranuras que describen el bobinado principal (varios valores uno para cada ranura válida)
y el duodécimo:
NDP: identificación del arrollamiento en la tabla
DIAMC: diámetro del conductor
Se proponen dos alternativas para describir el arrollamiento, una utiliza tablas (ver tabla 7.4) con arrollamientos predefinidos (con la identificación NDP), la otra en cambio define el número de ranuras del arrollamiento, y fija los factores que son proporcionales a la cantidad de conductores que contiene la ranura (como el arrollamiento es siempre simétrico estos factores se definen para la mitad de las ranuras).
Se explica a continuación la modalidad que se adopta para determinar el devanado principal, método que también se utilizará para el devanado auxiliar (de arranque).
Si se ha impuesto NXP, número de ranuras que contienen el arrollamiento, el valor se debe comparar con el número de ranuras por polo, NXP debe ser igual o superarlo en uno. Si se da error por esta condición el programa buscará el arrollamiento de la tabla numerado con NDP.
Si NXP es válido, los valores de CIP pueden ser cualesquiera, pero no pueden ser todos nulos, de ser nulos el programa buscará el primer arrollamiento de la tabla que cumpla el valor NXP, de no encontrarlo buscara el NDP.
Si la búsqueda fracasa se adopta el primer arrollamiento con el número de ranuras por polo válido que se encuentra en la tabla.
Para arrollamientos a único estrato como los aquí utilizados, son aplicables los mismos criterios ya vistos para el motor polifásico, el número de vías de corriente o paralelos externos debe ser divisor del número de polos (en los casos extremos uno o el número de polos).
Recordemos que el número de vías externas de corriente incide en las dimensiones de los conductores, facilitando de este modo la construcción de los arrollamientos, y que las vías internas de corriente se realizan para subdividir el conductor en varios subconductores de sección equivalente también para facilitar su realización.
El número de ranuras, y su ocupación, se adoptan en alguna forma, definiendo el arrollamiento, varios valores permiten describir el contenido de las ranuras, los valores de CIP entrados como datos, los valores BCP que valen1 para las ranuras no compartidas y 2 para las compartidas, el valor TIP es el paso de las distintas bobinas (Ti).
Se hace la suma de los CIP, que corresponden a un polo y se lo llama SUMCI (S Ci del principal).
Luego se debe determinar el factor de distribución tanto para la fundamental como para las armónicas (impares 3, 5, 7, ...). El factor de distribución para la fundamental y cada armónica para devanados concéntricos se obtiene con:

donde:
- ± : el signo de la fórmula es + si n=4r+1 y - si n=4r-1;
- n: orden de la armónica, donde n=4r+1 ó n=4r-1, siendo r un número entero cualquiera que genera las armónicas de interés 3, 5, 7, 9,11 etc. (n =1 fundamental);
- Ci: conductores por ranura;
- Bi: Ti´180´ NPOL/2´ Q1 ángulos en función de los pasos de bobinas Ti medidos en ranuras.
El factor de distribución de la fundamental kw debe ser próximo a1, para tener un buen aprovechamiento.
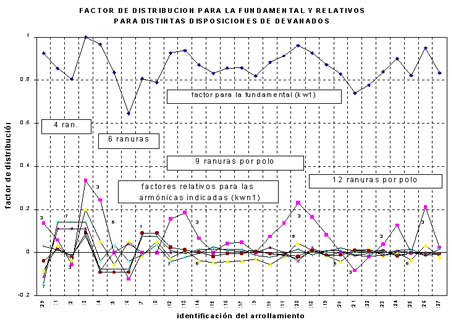
Tabla 7.4 - Factor de distribución y contenido armónico para devanados concéntricos.
| N° | Ranuras por polo | Distribución | Fundam kw | Factor de armónica "n"/ (n á kw)(pu) | |||||
| 1 2 3 4 5 6 7 8 9 10 11 12 13 | 1 | 3 | 5 | 7 | 9 | 11 | 13 | ||
| 29 | 4 | 1 x x 1 | .92388 | .1381 | -.0828 | -.1429 | -.1111 | -.0377 | .0319 |
| 3 | 4 | 1 x x x 1 | 1 | .3333 | .2 | .1429 | .1111 | .0909 | .0769 |
| 1 | 4 | 1 1 x 1 1 | .85355 | .0572 | .0343 | .1429 | .1111 | .0156 | .0132 |
| 2 | 4 | 1 2 x 2 1 | .80474 | -.0572 | -.0343 | .1429 | .1111 | -.0156 | -.0132 |
| 4 | 6 | 1 x x x x 1 | .96592 | .2440 | .0536 | -.0383 | -.0813 | -.0909 | -.0769 |
| 5 | 6 | 1 1 x x 1 1 | .83651 | 0 | -.0536 | .0383 | 0 | -.0909 | -.0769 |
| 6 | 6 | 1 1 1 1 1 1 | .64395 | -.1220 | .0536 | -.0383 | .0407 | -.0909 | -.0769 |
| 7 | 6 | 1 2 1 x 1 2 1 | .80801 | 0 | -.0144 | -.0103 | 0 | .0909 | .0769 |
| 8 | 6 | 1 1 1 x 1 1 1 | .78867 | 0 | .0536 | .0383 | 0 | .0909 | .0769 |
| 13 | 9 | 3 2 x x x x x 2 3 | .93729 | .1848 | .0084 | -.0215 | 0 | .0137 | -.0032 |
| 12 | 9 | 1 1 x x x x x 1 1 | .92542 | .1560 | -.0241 | -.0404 | 0 | .0257 | .0093 |
| 14 | 9 | 2 2 1 x x x 12 2 | .86889 | .0664 | -.0363 | -.0021 | 0 | .0013 | .0140 |
| 17 | 9 | 8 8 5 x x x 5 8 8 | .85812 | .0480 | -.0388 | .0058 | 0 | -.0037 | .0149 |
| 16 | 9 | 3 3 2 x x x 2 3 3 | .85475 | .0422 | -.0396 | .0083 | 0 | -.0053 | .0152 |
| 15 | 9 | 1 1 1 x x x 1 1 1 | .83120 | 0 | -.0453 | .0264 | 0 | -.0168 | .0174 |
| 28 | 9 | 1 2 x x x x x x 2 1 | .95979 | .2315 | .0453 | -.0264 | -.0386 | -.0168 | .0174 |
| 11 | 9 | 1 2 1 x x x x 1 2 1 | .91136 | .1372 | -.0157 | -.0140 | 0 | -.0089 | -.0060 |
| 10 | 9 | 1 2 2 x x x x 2 2 1 | .88229 | .0756 | -.0556 | -.0060 | .0252 | -.0038 | -.0214 |
| 9 | 9 | 1 2 2 1 x x 1 2 2 1 | .81858 | 0 | -.0296 | .0092 | 0 | .0058 | -.0114 |
| 18 | 12 | 2 1 1 x x x x x x 1 1 2 | .92503 | .1665 | .0115 | .0063 | .0230 | .0120 | -.0101 |
| 19 | 12 | 2 2 1 1 x x x x 1 1 2 2 | .87213 | .0832 | -.0115 | .0063 | -.0115 | -.0120 | .0101 |
| 20 | 12 | 1 1 1 1 x x x x 1 1 1 1 | .82936 | 0 | -.0429 | .0235 | 0 | -.0120 | .0101 |
| 22 | 12 | 3 3 2 2 2 x x 2 2 2 3 3 | .77629 | -.0194 | .0179 | .0002 | -.0156 | .0070 | -.0060 |
| 21 | 12 | 1 1 1 1 1 x x 1 1 1 1 1 | .74002 | -.0832 | .0115 | .0063 | -.0115 | .0120 | -.0101 |
| 26 | 12 | 1 2 1 x x x x x x x 1 2 1 | .94947 | .2119 | .0343 | -.0144 | -.0121 | -.0016 | -.0013 |
| 24 | 12 | 1 2 1 1 x x x x x 1 2 1 1 | .90099 | .1263 | -.0025 | .0103 | .0072 | -.0156 | -.0132 |
| 23 | 12 | 1 2 211 x x x 11 2 21 | .83872 | .0401 | -.0144 | -.0010 | -.0134 | .0092 | .0078 |
| 27 | 12 | 15 30 24 2413 x x x 13 24 24 30 15 | .83239 | .0236 | -.0192 | .0161 | -.0028 | -.0038 | -.0032 |
| 25 | 12 | 1 2 2 21 x x x 1 2 2 21 | .82226 | 0 | -.0343 | .0144 | 0 | -.0016 | -.0013 |
Para las armónicas el factor de distribución se da en valor relativo respecto del valor correspondiente a la fundamental, y el orden de la armónica:
El contenido de las armónicas de un devanado concéntrico puede considerarse bajo, como se observa en la tabla 7.4.
También se nota que para diferentes números de ranuras por polo, ciertas armónicas tienen el mismo valor en p.u. para las distintas distribuciones. A estas se las denomina armónicas de ranura, sólo dependen del número de ranuras por polo, no de la distribución.
En función del número de ranuras por polo la tabla 7.4 permite seleccionar aquella distribución que tenga el menor contenido armónico y que deje un número adecuado de ranuras disponibles (indicadas con x) para el devanado auxiliar o de arranque.
Se observa que el número de orden de la primera columna no es correlativo, este número de1 a 27 corresponde con la tabla incluida en [1], el orden establecido en la tabla 7.4 es para un número de ranuras por polo creciente, las distribuciones 28 en más se han agregado a las propuestas por Veinott. Ademas el orden de los arrollamientos en la tabla es en base a valores de kw decrecientes para cada grupo con un mismo número de ranuras utilizadas, de manera que cuando el programa adopta un arrollamiento es con el criterio de obtener el mayor kw.
Como antes dicho, durante la ejecución del programa pueden proponerse otras distribuciones cualesquiera y el programa calculará los kw correspondientes debiendo juzgarse estos resultados.
La figura 421 muestra los valores de la tabla 7.4, y resulta de utilidad para visualizar rápidamente, en función del número de disposición de devanado, el valor del factor de distribución y el contenido armónico (3, 5, 7, 9,11 y13), observándose que prevalece la 3ra. armónica (para algunas disposiciones) y mientras que las restantes se mantienen dentro de una banda relativamente estrecha.
Se han determinado entonces en p.u. los factores de distribución para la fundamental, y para las armónicas impares de interés, también se determinan la suma de cuadrados de los factores de las armónicas y la raíz de esta suma (valor eficaz), que es una forma de totalizar el efecto de las armónicas.
De la expresión del flujo por polo en función de la tensión, se determina el número teórico de conductores activos del devanado.
siendo:
- CC: número teórico de conductores activos
- UU1: tensión nominal (V)
- CKFI: factor que afecta la tensión (CKFI =1 - CIV)
- CIV: caída de tensión relativa
- F0: frecuencia
- kw: factor de distribución de la fundamental
El número de conductores por vía debe ser forzado a un valor compatible con la solución que finalmente se elija, como a continuación se explica, en consecuencia se deberá ajustar el flujo y la inducción en el diente previamente adoptada.
El número de conductores base en la ranura (para CIP =1) resulta:
Debiendo hacerse este valor entero, y al menos igual a1.
El número de conductores en cada ranura se determina con:

Al menos en una ranura se presenta el valor máximo, también se hace la suma de estos valores obteniéndose un nuevo CC = SUMC total de conductores
Se ajusta ahora el flujo por polo y la inducción en el diente, utilizando el valor de CC finalmente adoptado mediante:
A modo de ejemplo la figura 422 muestra el desarrollo del arrollamiento principal o de trabajo a estrato único de un motor monofásico que tiene18 ranuras estatóricas y 2 polos.
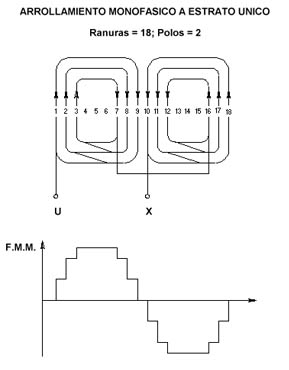
Corresponde a la distribución N°14 de la tabla 7.4, pudiendo observarse que de las 9 ranuras por polo, 3 están completamente libres para el devanado auxiliar o de arranque. Se representa además el correspondiente diagrama de f.m.m. con la distribución de conductores en las ranuras que se explica a continuación.
También podría haberse elegido la distribución N°10, observándose aquí que 4 ranuras están disponibles para el devanado auxiliar.
Observemos una diferencia importante, la distribución N°10 es de paso entero, mientras que la N°14 es de paso acortado (en una ranura).
Al utilizar la distribución N°10, de paso entero debe observarse que las ranuras1 y10 están compartidas por las bobinas de máximo paso de polos contiguos.
En rigor entonces las ranuras1 y10 se encontrarán ocupadas por conductores de dos bobinas de polos distintos, para estas encuentran sentido los valores BCP que valen 2 para las ranuras compartidas.
Para el ejemplo de distribución N°14 el número de conductores activos totales resulta CC = 400, el número de vías externas se adopta igual a1, (los dos polos en serie) y por lo tanto la totalidad de conductores activos (los 400) se deben distribuir debajo de los dos polos (200 en cada polo).
De la tabla se tiene que la distribución en las ranuras de los conductores por polo es proporcional a 2,2,1,0,0,0,1,2,2, el número de conductores por polo entonces debe ser múltiplo de10, número obtenido sumando los factores de distribución, si el número de conductores por polo no cumple esta condición deberá forzarse.
Por lo tanto el número de conductores activos por ranura resulta C0 = 200 /10 = 20 para aquellas ranuras que le corresponde el factor1.
La cantidad de conductores en cada ranura es igual a C0 por el factor de distribución Ci que le corresponde, es decir, C1 = C2 = 2´ 20 = 40; C3 =1´ 20 = 20.
En cambio si el número de vías de corriente se adopta igual a 2, el número de conductores activos totales por rama debe ser el mismo, y se deben distribuir debajo de un polo solamente, el número de conductores activos por ranura resulta entonces C0 = 400 /10 = 40 para las ranuras que les corresponde factor1 y 80 para las otras.
En este caso el número de conductores por ranura resulta igual al doble de los que se tenían cuando se adoptaba una sola vía externa, siendo la sección igual a la mitad por conducir sólo el 50% de la corriente.
En los devanados concéntricos (normalmente utilizados en este tipo de motores) no hay un paso único de bobina, como para los devanados a doble estrato utilizados en máquinas trifásicas, pudiéndose definir un paso promedio como si todas las bobinas fuesen iguales, y que se utiliza en los cálculos donde interviene la dimensión de la bobina.
Para la distribución adoptada el programa construye una tabla que muestra el factor CIP de distribución de conductores por ranura, el factor de multiplicidad BCP que es1 cuando la ranura no se comparte y 2 cuando se comparte y finalmente los pasos para cada una de las bobinas que forman el arrollamiento principal.
A continuación se indica la suma de los factores de distribución, el factor de distribución para la fundamental y los factores armónicos en p.u. para los armónicos considerados.
El paso promedio se calcula en función del número de conductores alojados en cada ranura y del paso que tiene cada una de las bobinas que componen el arrollamiento con la expresión:

donde para el primer ejemplo considerado el número de conductores efectivos por ranura es C1 = C2 = 40 conductores, C3 = 20 y los pasos de cada bobina son T1 = 8, T2 = 6 y T3 = 4, obteniéndose ACT = 6.4.
Tampoco hay una longitud única de cabeza de bobina y se define en modo análogo una longitud promedio que es igual al producto del arco que corresponde al diámetro en el centro de las ranuras estatóricas multiplicado por una constante empírica y por el paso promedio.
La longitud media del conductor utilizada para los cálculos resulta entonces:
siendo:
DE : diámetro en el centro de las ranuras del estator
g :1.3 para 2 polos,1.5 para 4 polos y1.7 para 6 o más polos
Se impone para este devanado la densidad de corriente en consecuencia se obtiene la sección del conductor y su diámetro (téngase en cuenta que para estos motores se utilizan conductores de sección redonda), y se ajusta el diámetro a valores normalizados, se recalcula el área y la densidad de corriente.
En el cuarto paso se determina a partir de la corriente, densidad de corriente, y número de vías, la sección de los conductores y su diámetro. Si este último no fue impuesto se adopta el valor calculado, en caso contrario a partir del diámetro impuesto se determinan los valores de interés.
Se determina el área neta ocupada por el máximo número de conductores por ranura y el coeficiente de aprovechamiento. Nótese que todavía no se tiene en cuenta el bobinado de arranque.
Con el peso específico se determina el peso total de este arrollamiento, y con la resistividad su resistencia y la caída relativa de tensión que se compara con el valor previamente adoptado.
siendo CIV1 la componente resistiva de la caída de tensión.
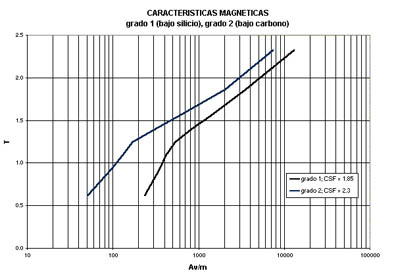
Característica magnética utilizada para los cálculos
El decimotercer registro incluye los siguiente datos:
- relleno (dato nulo)
- SHEL: paso de hélice del rotor
- FREBW: frecuencia de referencia de inducción pérdidas
- EBW: exponente de la característica inducción pérdidas
- relleno (dato nulo)
- CSF: coeficiente de pérdidas superficiales (para el material magnético utilizado por el programa vale1.85).
En el quinto paso se determinan las pérdidas y la corriente de excitación.
El decimocuarto incluye los siguientes datos:
BW: hasta 8 valores de inducción ordenados en forma creciente
El decimoquinto:
WK: hasta 8 valores de las correspondientes pérdidas en W/kg
El decimosexto:
AS: hasta 8 valores de las correspondientes intensidades de campo en A/cm.
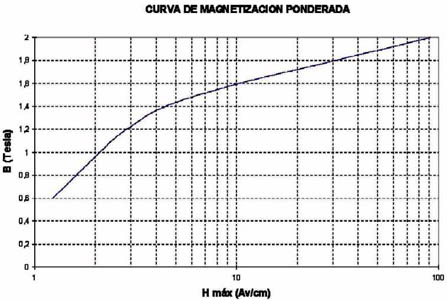
Si estos datos son nulos, el programa carga los correspondientes al material grado 2 de bajo contenido de carbono de la figura 423 que corresponde a una característica magnética de material estándar usado para motores de inducción en la bibliografía [1].
La curva de magnetización que se extrae de los catálogos, es aplicable cuando se tiene una distribución de la inducción uniforme (como por ejemplo en un transformador), en cambio no es aplicable cuando la inducción no es uniforme en las distintas partes del circuito magnético como ocurre en un motor.
Es necesario para calcular obtener una característica magnética que tenga en cuenta esta situación.
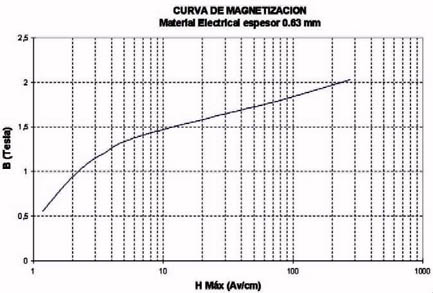
El valor máximo de inducción en los dientes se tiene en el centro de un polo, para los restantes dientes se considera que la inducción varía con ley sinusoidal como se indica en la curva Bd de la figura 424.
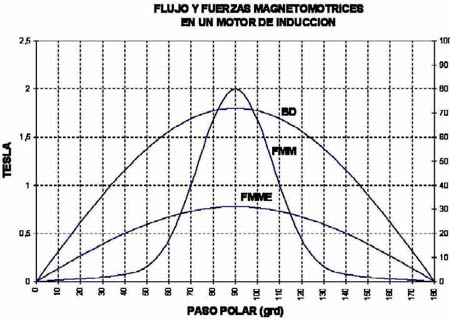
Con los valores de inducción en los distintos puntos (dientes) y con la curva de saturación figura 425 se obtienen los correspondientes valores de f.m.m. y se construye la curva de f.m.m. indicada en la figura 424, que muestra un pico más o menos pronunciado función del valor máximo de inducción.
La curva que corresponde a la f.m.m. encierra un área (integral a lo largo de un polo), a los fines del cálculo se puede suponer una fuerza magnetomotriz equivalente que tiene distribución sinusoidal y que encierra la misma área.
En consecuencia algunos dientes tendrán f.m.m. en exceso otros en defecto y en promedio el valor de la fuerza magnetomotriz equivalente será representativo en modo aceptable para el cálculo.
Repitiendo este análisis para distintos valores de inducción en los dientes en correspondencia con el eje de simetría del polo (inducción máxima), se obtiene una curva de magnetización ponderada como muestra la figura 426 que es utilizada en los cálculos.
El programa determina esta característica a partir de la curva de magnetización entrada como dato.
La integral de la curva Bd corresponde al flujo que se establece en los dientes correspondientes a un polo, y que debe conducirse por la corona tanto del estator como del rotor.
La integral de esta curva tiene una variación cosenoidal que tiene valor cero en el centro del polo y máximo en ambos extremos.
Suponiendo que el valor de inducción máximo en la corona es el mismo que para los dientes (en los motores reales siempre es menor), los valores de f.m.m. para esta parte del circuito varían punto a punto como para los dientes.
Se toma como f.m.m. ponderada para la corona tanto del estator como del rotor, el valor medio del valor pico correspondiente a la curva de f.m.m. equivalente, es decir, para la corona se multiplica por 2/p los valores de la curva de saturación ponderada.
Factores de Carter y de flujo
En el sexto paso se calculan los factores de Carter para el estator y el rotor, su producto y además otros factores que se explican a continuación.
En máquinas monofásicas (también se utiliza en las polifásicas) se define el factor KP denominado factor primario del flujo que tiene en cuenta la impedancia de magnetización (reduce el flujo)

siendo X0 la reactancia de dispersión de vacío y Xla reactancia de dispersión de cortocircuito.
Este factor KP se lo utiliza para calcular las inducciones en la corona, en el diente del rotor y en el entrehierro.
Como todavía no se han determinado las reactancias, se pude estimar su valor con la expresión.

donde NPOL es el número de polos.
En máquinas monofásicas es el factor total del flujo que se utiliza para calcular la inducción en el entrehierro.
El flujo en el rotor es menor que el del estator, debido al flujo disperso en el estator, en máquinas monofásicas el flujo se reduce aún más que en las polifásicas, y se tiene en cuenta este efecto mediante el factor de flujo KC que se utiliza para calcular la inducción en la corona y en el diente del rotor.

Se calcula, como ya visto para el motor asincrónico trifásico, el valor de inducción en cada tramo del circuito magnético (estator, rotor y entrehierro).
Con estos valores utilizando la curva de magnetización ponderada se determina la tensión magnética necesaria para cada tramo del circuito (dientes y corona) de estator y la tensión magnética total. También se determinan las pérdidas especificas, las parciales correspondientes y las totales del estator.
Finalmente si corresponde se deben corregir las pérdidas en relación con la frecuencia de funcionamiento del motor, y de las características magnéticas, según se indica:
El cálculo se repite para el rotor, pero solo se determina la tensión magnética.
Se calcula el factor de saturación como relación entre la f.m.m. total (incluyendo la corona y dientes del estator y del rotor) y la f.m.m. del entrehierro. Se destaca que el cálculo de este factor se diferencia del utilizado para el motor polifásico, donde no se considera la corona del estator y del rotor.
Cálculo de la reactancia de dispersión
Se recuerda que las reactancias de dispersión son uno de los factores más importantes que inciden en el comportamiento de las características funcionales del motor, de ellas dependen el par de arranque, el par máximo y la corriente de arranque.
El método de cálculo adoptado [1] que contiene correcciones empíricas, ha sido utilizado para motores de potencia fraccionaria con resultados satisfactorios.
De un modo similar al ya visto para las máquinas trifásicas, la reactancia de dispersión se la considera compuesta por cinco componentes, es decir, la reactancia de dispersión de ranura (del estator y del rotor), la zig-zag, la de cabeza de bobina y de anillos, la diferencial y por último la de hélice.
a) Dispersión de ranura
La reactancia de dispersión de ranura tiene en cuenta solamente las líneas de flujo que se cierran dentro de la ranura misma concatenando los conductores que lo establecen.
Se recuerda que la permeancia de dispersión depende de la geometría de la ranura y de la ubicación de los conductores en ella. En la figura 485 se muestran los tipos de ranuras utilizadas para el estator.
Para una ranura de fondo plano (tipo 3) la constante de ranura de la parte en aire resulta:
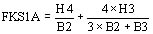
de la parte con conductor resulta:
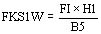
haciendo  se determina el factor FI que depende de la geometría de la ranura
se determina el factor FI que depende de la geometría de la ranura
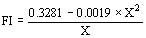
Para una ranura de fondo semicircular (tipo 4) la parte en aire FKS1A es igual que para la ranura tipo 3, mientras la parte con conductor:

En la figura 486 se muestran los tipos de ranuras utilizadas para el rotor.
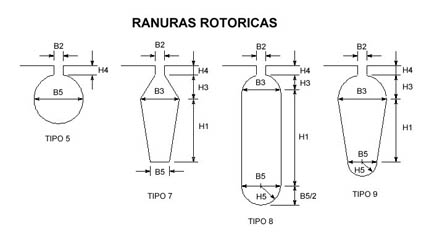
Para una ranura redonda (tipo 5) la constante de ranura parte en aire resulta:

mientras que si es cerrada (B2=0)

para la parte con conductor resulta:

Para una ranura tipo 7 la parte en aire si la ranura es semicerrada (B2 mayor que cero) resulta:
mientras que si es cerrada (B2=0)

parte con conductor semicerrada o cerrada (FI y X mantienen los valores arriba indicados utilizando lógicamente los valores correspondientes al rotor):
Para una ranura tipo 8 la constante de ranura parte en aire FKS2A resulta igual a la ranura 7, semicerrada o cerrada, mientras la parte con conductor:

pero si H1=0
FKS2W=0.625
Para una ranura ojiva tipo 9 la parte en aire FKS2A resulta igual a la ranura 7 semicerrada o cerrada, la parte con conductor semicerrada o cerrada:

pero si H1=0
FKS2W=0.625
Encontradas las constantes de ranura, se suman y se determina la permeancia de dispersión, para la ranura estatórica resulta:

para tener en cuenta que el devanado estatórico es concéntrico, se utiliza un factor CX que resulta:

La permeancia de dispersión de la ranura rotórica resulta:

b) Dispersión zig-zag
Algunos autores denominan así a la dispersión entre las cabezas de dientes adyacentes, normalmente lo hacen a través del entrehierro.
Se determina un factor que tiene en cuenta para el cálculo un paso de ranura promedio que resulta:
la permeancia de dispersión resulta:
c) Dispersión de cabeza
Se debe a las líneas de flujo concatenadas por las cabezas del devanado estatórico y por los anillos de la jaula del rotor; recordando lo dicho para otras máquinas rotantes, esta permeancia es difícil de calcular con precisión debido a la presencia de campos tridimensionales de forma irregular, dependiendo además de la forma de las cabezas, de la proximidad de materiales magnéticos, o de factores de diseño y fabricación.
La permeancia de dispersión de cabeza resulta:
siendo el diámetro en el centro de las ranuras estatóricas.
d) Dispersión diferencial
La interpretación de la dispersión diferencial en los motores de inducción con rotor jaula, presenta discrepancias, que se evidencian mencionando que en la bibliografía [1] ciertos autores sostienen que no se presenta esta dispersión.
Prescindiendo de consideraciones académicas, se puede afirmar que si no se tiene en cuenta esta componente de dispersión, los valores de reactancia calculados son siempre menores que los obtenidos mediante ensayos.
Debido a que la inclinación de ranura introduce una dispersión diferencial, se utiliza finalmente una expresión que tiene en cuenta esta situación:
Para ello se debe calcular la permeancia de magnetización que resulta:

siendo:
GE = DELTA ´ FCAR3 la longitud efectiva del entrehierro
 el paso polar
el paso polar
 el área al entrehierro
el área al entrehierro
factor para calcular la permeancia diferencial
la permeancia diferencial resulta:

e) Dispersión de hélice
La inclinación de las ranuras tanto del rotor como del estator de un motor tiene el efecto, entre otros, de introducir como arriba dicho una dispersión diferencial denominada dispersión de hélice.
Con SHEL se indica el paso de hélice medido en paso de ranura del rotor que vale 0 sin inclinación (normalmente 0.5 o 1).
Se determina el ángulo de la hélice en grados eléctricos y en radianes, este último se denomina SKANG.
El factor para calcular la dispersión de hélice:

se observa que para SHEL = 0, el ángulo es nulo y por lo tanto resulta el valor de CSK = 1.
La permeancia de dispersión de hélice resulta:

Reactancias en ohm
Para calcular las componentes de las reactancias en ohm se multiplican las respectivas permeancias por  factor de conversión.
factor de conversión.
siendo:
CKWM = CM ´ KW el número total de conductores efectivos (número de conductores en serie totales del devanado principal (CC) por el factor de distribución (KW) para la fundamental).
Se tienen entonces:
XPS = AKX ´ PSLOT ranura estatórica
XSS = AKX ´ SSLOT ranura rotórica
XZZ = AKX ´ ZIGZAG zig-zag (cabeza de dientes)
XND = AKX ´ ENP cabeza de bobina
XBL = AKX ´ BELT diferencial
XSK = AKX ´ SKEW hélice
Se determina un factor de dispersión de entrehierro:

La reactancia de dispersión del devanado principal resulta:
X1 = AKX ´ (PSLOT + ENP + GALP)
La reactancia de dispersión del rotor referida al principal resulta:
X2 = AKX ´ (SSLOT + GALP)
La reactancia de magnetización referida al principal resulta:
XM = AKX ´ 0.6468 ´ AKM ´ CSK
La reactancia ideal de cortocircuito resulta:
La reactancia de vacío resulta:

Se recalcula el factor de flujo primario HKP permitiendo verificar si la aproximación hecha inicialmente fue acertada.
Diseño de la jaula rotórica
Para pequeños motores de inducción resulta de fundamental importancia la obtención de un adecuado valor de resistencia para el rotor, debiendo mantenerse lo más bajo posible para reducir las pérdidas joule y en consecuencia tener menores sobretemperaturas, además obtener un rendimiento alto y un resbalamiento bajo.
El decimoséptimo registro incluye los siguiente datos:
relleno (dato nulo)
ESPA: espesor anillo (mm)
DEA: diámetro exterior anillo (mm)
DI: diámetro interior (mm)
Si no se ha impuesto el diámetro del anillo se calcula su sección:
donde SN(2) es la sección de la barra y la densidad de corriente en la barra es igual a la del anillo, y que se utiliza si no están fijados los tres valores ingresados ESPA, DEA, DI.
También se fija el valor HANILL = HH5 que será adoptado si los datos no permiten su correcta determinación.
Se controla que el valor DEA > DI si esto no se cumple el valor es erróneo y se hace DEA = 0.
Si los tres valores ingresados ESPA, DEA, DI son nulos se inicia definiendo el diámetro interno:

El valor de DI puede no ser nulo, y en tal caso es aceptado luego se determina:

Pudiendo ocurrir que también DEA sea no nulo y entonces también es aceptado, se pueden ahora determinar:
Si en cambio ESPA > 0 en la misma forma que antes se determinan DI y HANILL:
Se determina DEA:
DEA = DI + 2 ´ HANILL
Se determina la altura del anillo:
HANILL = (DEA -DI) / 2
Finalmente se determina la sección del anillo:
SA3 = ESPA ´ HANILL
También es importante para un flujo dado tener un elevado par de arranque, y como este depende del valor de resistencia rotórica, el valor mínimo está supeditado a los requerimientos del arranque.
Un parámetro significativo para el proyecto es la relación entre la resistencia rotórica referida al devanado principal y la reactancia, como guía se tiene que para motores con arranque a capacitor esta relación varía entre 0.45 a 0.80, correspondiendo los valores menores a motores de menor potencia.
Si la ranura es de caras paralelas y las barras estrechas y de altura considerable, como ya visto para el motor asincrónico trifásico de jaula profunda, se produce en el momento del arranque con plena frecuencia, una fuerte concentración de corriente en la parte superior de la barra, lo cual equivale a un aumento de resistencia rotórica y con ello del par.
Cuando el motor se acelera disminuye la frecuencia en el rotor y el efecto de concentración mencionado, y en condiciones normales de funcionamiento la distribución de corriente en las barras se hace uniforme.
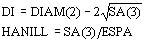
Para tener en cuenta este efecto se afecta la resistencia de barra por un factor CIR que se obtiene de la figura 487 en función de la profundidad de barra equivalente (PBE), que es función de la conductividad COND, de la frecuencia F0, de la geometría de la ranura y particularmente de su altura real.

siendo:
WBAR: ancho de la barra (mm)
B3: ancho de la ranura (mm)
HB: altura real de la barra (mm)
También se obtiene el factor CIX que se utiliza para corregir la reactancia, siendo esta figura válida para barras de aluminio con una conductividad relativa de 50%, considerando que la conductividad 100% corresponde a la del cobre puro comercial a 25° C.
Utilizando estas curvas la profundidad equivalente de la barra resulta prácticamente igual a la altura real, para la mayoría de motores de potencia fraccionaria con jaula fundida en aluminio, por lo tanto carece de sentido realizar correcciones, es decir, ambos factores valen 1 (para estos motores la profundidad equivalente no supera los 10 mm).
Factor para calcular la resistencia de las barras:
siendo:
SK: paso de la hélice p ´ DIAM2/Q1 (mm)
SN(2): sección de la barra (mm²)
Factor que tiene en cuenta el efecto del ancho del anillo en el sentido radial en la distribución de la corriente que proviene de la barra (factor de Trickey):

hacemos  siendo DI el diámetro interno del anillo y DR el diámetro al centro de la barra.
siendo DI el diámetro interno del anillo y DR el diámetro al centro de la barra.
Factor para calcular la resistencia de los anillos:
siendo:
SA(3): sección del anillo (mm²)
Factor que refiere la resistencia del rotor al devanado principal:
 siendo RHO(2) la resistividad para la barra y el anillo a 75 ºC que para aluminio es 0.034 ohm´ mm²/m.
siendo RHO(2) la resistividad para la barra y el anillo a 75 ºC que para aluminio es 0.034 ohm´ mm²/m.
La resistencia de la barra resulta:
BARR=A163 ´ BAR
La resistencia del anillo resulta:
RNGR=A163 ´ RING
La resistencia del rotor
R2 = BARR+RNGR
A este punto resulta conveniente verificar si la relación R2/X entre la resistencia rotórica referida al primario y la reactancia se encuentra comprendida en el rango arriba aconsejado, en caso de no ser así queda a criterio del proyectista modificar el diseño si lo considera conveniente.
Pérdidas magnéticas y adicionales (régimen sinusoidal)
Las pérdidas en las laminaciones magnéticas utilizadas en las máquinas rotantes están generalmente medidas o calculadas en condiciones de régimen y con un flujo sinusoidal.
La figura 488 corresponde a la característica de pérdidas específicas en el hierro referida a 50 Hz, para el material que se utiliza el programa, cuando no se ingresan datos de otro material.
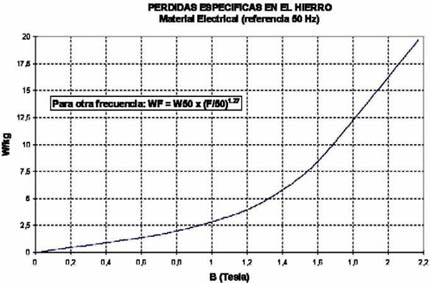
Con el valor de inducción adoptado para el diente y para la corona del estator, se obtienen las pérdidas específicas correspondientes, con el peso de la corona y de los dientes se determinan las pérdidas en cada una de estas partes del circuito.
Las pérdidas así calculadas son teóricas (obtenidas en base a la información de fabricantes de materiales magnéticos), es decir, no tienen en cuenta el efecto del punzonado, estado de las herramientas de corte (rebabas), manipulaciones del material, rectificado o limado de entrehierros y ranuras (siempre muy perjudiciales) o cualquier otra operación a que deba someterse la laminación durante la fabricación.
Para ajustar el valor de estas pérdidas, se justifica plenamente recurrir a datos experimentales obtenidos sobre la base de máquinas similares.
En el caso de los motores asincrónicos que tienen ranuras en el estator y en el rotor, con una distribución de campo sinusoidal, hay que considerar la presencia de pérdidas superficiales que se producen en la superficie de los extremos de los dientes.
Para estas máquinas la pulsación del flujo principal no solo produce pérdidas superficiales sino que afecta a los dientes en su totalidad.
Las pérdidas superficiales y de pulsación de flujo tienen un valor reducido si se las compara con las pérdidas por histéresis y Foucault, pero conviene adicionarlas para tener una mejor aproximación del cálculo de las pérdidas totales en el hierro.
Se pueden determinar estas pérdidas con la expresión obtenida de la bibliografía [1]:

siendo:
CSF: coeficiente de pérdidas superficiales
BEH: inducción en el entrehierro (T)
DIAM1: diámetro al entrehierro (mm)
Las normas definen las pérdidas adicionales como aquella parte de las pérdidas totales que excede la suma de las pérdidas por rozamiento y ventilación, más las pérdidas joule del estator y del rotor, más las pérdidas en el hierro.
Estas pérdidas son difíciles de calcular, pudiendo el proyectista evaluarlas en base a su experiencia de construcciones similares, como un porcentaje de las pérdidas totales.
Pérdidas en régimen no sinusoidal
Debido a la introducción de métodos de regulación electrónicos de la velocidad en motores de media y pequeña potencia, la variación del flujo en el tiempo está afectado por una cierta distorsión, puesto que en el núcleo la forma de la inducción magnética es de tipo trapezoidal.
Las normas de materiales magnéticos se refieren exclusivamente al caso de flujo sinusoidal y resulta interesante poder hacer una previsión de las pérdidas en régimen trapezoidal, sobre la base de la información de materiales magnéticos obtenida con los métodos tradicionales, para poder elegir acertadamente el tipo de material magnético para la construcción de un motor que funcione en estas condiciones.
En la figura 489 se representa el comportamiento en el tiempo de la inducción magnética B y de su derivada con respecto al tiempo, en línea llena para flujo sinusoidal y línea punteada para flujo trapezoidal.
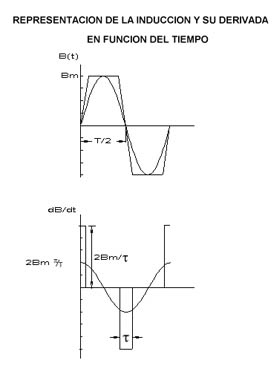
La onda trapezoidal se caracteriza además que por la frecuencia, por el intervalo de tiempo t (constante de tiempo) durante el cual se produce, en cada semiperíodo, la inversión de la magnetización.
En la figura 490 se representa para una laminación de Fe-Si, la relación entre las pérdidas totales para régimen trapezoidal y sinusoidal, para una inducción máxima de 1.5 T, en función de la frecuencia para 3 valores del tiempo t , observándose que la relación de pérdidas decrece con el valor de t y de la frecuencia.
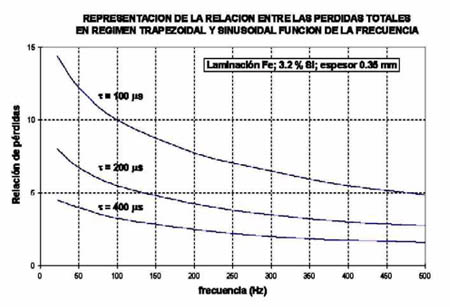
El aumento de pérdidas como consecuencia de un flujo trapezoidal puede resultar muy elevado, observándose que para una frecuencia de 100 Hz y un valor de t = 200 microsegundos la relación resulta aproximadamente igual a 6.
En estos casos el proyectista deberá adoptar los recaudos de diseño necesarios para contener las pérdidas dentro de valores aceptables.
Supuesto el flujo sinusoidal, para el cálculo de las pérdidas en el hierro se procede en modo análogo al utilizado para las máquinas ya tratadas.
Pérdidas mecánicas y de ventilación
En pequeños motores de inducción (con cojinetes de fricción) prevalecen las pérdidas mecánicas sobre las de ventilación. La siguiente expresión empírica permite calcular las pérdidas mecánicas y de ventilación:
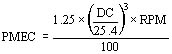
siendo:
DC: diámetro del eje en el cojinete (mm)
RPM: velocidad (v.p.m.)
Esta fórmula es válida para motores abiertos, debe duplicarse el valor calculado cuando se trata de motores cerrados.
El caudal de aire que mueve un ventilador es proporcional a la velocidad, pero la potencia que absorbe crece con el cubo de la velocidad. Puede ocurrir para una máquina muy veloz que el ventilador absorba una potencia excesiva, en cuyo caso se deberá estudiar cuidadosamente su diseño.
Cuando se proyecta la ventilación es de máxima importancia que el aire refrigerante pueda circular sin encontrar excesiva resistencia. Se deben evitar por lo tanto recorridos tortuosos, que los pasajes del aire sean lo más rectilíneos posibles, sin estrangulamientos de sección, en los cambios de dirección adoptar radios de curvatura grandes.
Las paredes internas deben ser lisas, particularmente se deben tratar de evitar aristas sobresalientes en las cuales se pueden depositar polvo o impurezas (máquinas autoventiladas), que además de dificultar la ventilación pueden afectar el buen aislamiento de la máquina, como así también formar vórtices de aire que producen caídas de presión, incrementado la potencia que absorbe el ventilador para un dado caudal de aire.
Cálculo del funcionamiento del devanado de trabajo
El cálculo se desarrolla por pasos con los que se avanza, si el método del programa de cálculo es interactivo el cálculo se desarrolla con conducción humana, en ciertos pasos se retrocede para mejorar los resultados, si se hiciera esto último este es el momento indicado para verificar el funcionamiento normal del motor (con solo el arrollamiento de marcha), en particular se analizará como se comporta el devanado de marcha (trabajo).
La versión del programa MOTMON que se entrega propone una metodología de horneada (batch) por lo que este estudio se deja para después del cálculo del arrollamiento de arranque.
De todos modos es lógico en este punto hacer el análisis del comportamiento del arrollamiento de marcha, y a continuación se hacen consideraciones sobre este tema.
En base a la teoría que estudia el funcionamiento del motor monofásico como superposición de un campo rotatorio directo y uno inverso, se propone el circuito equivalente de la figura 491 del cual se conocen todos los parámetros necesarios, que permiten determinar las magnitudes que definen las condiciones de funcionamiento del motor, cuando solamente se encuentra alimentado el circuito principal o de trabajo.
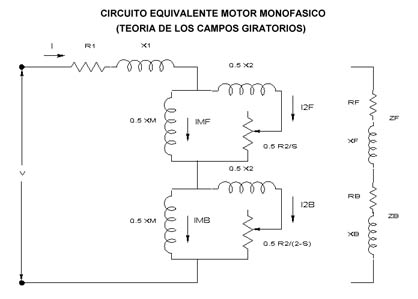
Básicamente estas magnitudes son la potencia que absorbe el motor en vacío y en plena carga, y el par máximo desarrollado.
Además para completar el análisis del comportamiento del proyecto se necesita calcular el desempeño del motor, velocidad, potencia, par, rendimiento, factor de potencia, para cada posible condición de marcha (distintos valores del resbalamiento).
Si estos resultados son satisfactorios, es decir, cumplen con las exigencias impuestas, el próximo paso es diseñar el devanado auxiliar o de arranque.
Cálculo del devanado de arranque
Este cálculo consiste en obtener para un devanado principal y su rotor ya calculados y verificada su característica de funcionamiento, el mejor devanado de arranque.
Para lograr este objetivo, en algunos casos, puede ser necesario retocar el devanado principal o introducir alguna variante en la resistencia rotórica.
Para cada solución válida de un devanado principal, hay siempre una gran cantidad de soluciones posibles para el devanado de arranque, el problema consiste en determinar cual de ellas es la mejor, con la condición de que se satisfagan las especificaciones requeridas.
El diseño del devanado auxiliar para un motor con arranque a capacitor (como es el caso aquí considerado) se complica por la presencia de este elemento (no presente en el caso de otro tipo de circuito de arranque).
Es necesario considerar además de los pares de arranque y nominal, y de la corriente de arranque, el valor de la capacidad necesaria y la tensión que se tiene sobre el capacitor, que algunas veces puede ser mayor que la tensión nominal del motor.
Es importante destacar que el costo del capacitor depende de su capacidad y del valor de tensión que debe soportar, y que las sobretensiones acortan notablemente su vida.
Aunque utilizando menos conductores se limita la tensión sobre el capacitor, para este tipo de arranque (con capacitor) es conveniente llenar con conductor el espacio disponible de la ranura.
Se inicia el séptimo paso con la lectura del decimoctavo registro que incluye los siguientes datos:
HNXA: número de ranuras que contienen el arrollamiento
CIA: para las mitad de las ranuras que describen el bobinado
El decimonoveno y último:
HNDA: identificación del arrollamiento en la tabla
DIAMA: diámetro del conductor devanado auxiliar (mm)
NVIAS: número de vías del devanado de auxiliar
A: relación entre el producto de conductores por el factor de distribución de los devanados auxiliar y principal (1 a 1.4)
SASP: relación de secciones auxiliar/principal
CMF: valor de la capacitancia (m F)
FLAG: Es para seleccionar que resultados se imprimen
relleno: (dato nulo)
Sigue un parámetro importante para el diseño del devanado auxiliar, es la relación entre los productos del número de conductores totales por el factor de distribución del devanado auxiliar y el principal.

Esta relación puede variar desde un valor menor a 1 hasta un valor igual o mayor a 1.4, normalmente cuanto mayor es la relación menor el valor de capacidad necesaria y la tensión que aparece sobre el capacitor.
Si la relación de secciones entre el devanado auxiliar y el principal no ha sido impuesta se hace SASP = 0.8.
Para iniciar el cálculo se puede adoptar un valor para la relación A, si este valor es nulo se hace A = 1.2, y se determina el valor de CCA ´ kwA.
El valor CCA es el número de conductores teórico que debe ser convertido a un número que permita la construcción del devanado.
Se puede nuevamente elegir de la tabla 7.4 una distribución que tenga el mismo paso exterior que el utilizado para el devanado principal identificándola con NDA, o bien proponer una distribución no incluida en la tabla con los valores de NXA y CI del arrollamiento auxiliar, obsérvese la total analogía que hay con el arrollamiento principal.
El programa hace la misma tarea que para el arrollamiento principal, primero trata de utilizar los valores ingresados de NXA y CI, si estos no son correctos o son nulos busca dentro de la tabla el valor entrado como dato de NDA, si este no corresponde con el valor de ranuras por polo fijado adopta el primer arrollamiento posible de la tabla, y determina los correspondientes valores de kw para la fundamental y los armónicos.
Pero se debe cuidar que la distribución adoptada no contenga un valor excesivo de componentes armónicos.
Para el ejemplo que se considera se propone la distribución 28 de la tabla 7.4 1,2,x,x,x,x,x,x,2,1 que se muestra en la figura 492 y se calcula el valor del factor de distribución con la expresión:

expresando los ángulos en función de los pasos de las bobinas medidos en ranuras mediante la relación Bi = Ti×180´ P / 2´ Q2, donde el número de conductores por ranura resulta C1=1, C2=2, y los pasos de bobina T1=9, T2=7.
El factor de distribución para las armónicas que interesan se calcula con la expresión ya vista para el devanado principal.
Para la distribución seleccionada el contenido de 3ra. armónica es del 23%, y se considera aceptable.
Para cada ranura del devanado de arranque se adopta (de la tabla 7.4) CIA factor del número de conductores, el factor de multiplicidad BCA que es 1 cuando la ranura no se comparte y 2 cuando se comparte.
En el ejemplo de la figura 492 se observa que para el devanado auxiliar la ranura 5 es compartida por bobinas de polos distintos, por lo tanto el factor de multiplicidad es 2.
El número total de conductores del devanado auxiliar resulta:

siendo SUMCIA suma de los CIA, que corresponden a un polo y NVIAA el número de vías de corriente del devanado auxiliar.
Con los CCA y kwA determinados para el devanado auxiliar finalmente definido, se debe entonces ajustar el valor de A.

El número de conductores de la ranura para el devanado de arranque es igual al producto CI´ BCA´ C1A (donde C1A es la relación entre el número de conductores presentes en la ranura y CI).
El producto de este número por la sección del conductor da la superficie ocupada por los conductores.
Análogamente para el devanado de arranque, teniendo en cuenta que está desplazado en el espacio de 90°, se obtiene la sección ocupada por este devanado.
Se destaca que este valor sólo tiene en cuenta los conductores, no se considera el aislamiento entre conductores y contra masa, ni el factor de llenado de la ranura.
En las ranuras se han colocado los arrollamientos de marcha y arranque, es necesario verificar que espacio ocupan ambos y cuan llena queda la ranura más ocupada.
Llegados a este punto del cálculo están definidos para ambos arrollamientos (marcha y arranque) el área del conductor adoptado, y la cantidad de conductores en cada ranura (que depende de la posición de la ranura en el polo).
Además se conoce el defasaje en ranuras entre ambos arrollamientos, se sabe si el arrollamiento es de paso entero (y si se comparten la primera y la última ranura) o es de paso acortado, (recordemos que frecuentemente se da que un arrollamiento sea entero y el otro acortado).
Se determina entonces la cantidad de conductores de ambos arrollamientos en cada ranura, el espacio ocupado por el material conductor dentro de la ranura, obteniéndose el grado de ocupación de la ranura.
Recordando que no todo el espacio de la ranura es llenado con los conductores (factor de aprovechamiento que es función del diámetro del conductor) y el espacio ocupado por la aislación contra masa, se verifica si el espacio disponible permite su construcción.
Impedancia a rotor bloqueado teniendo en cuenta la rama de magnetización
Para determinar con mayor exactitud las constantes del motor, se debe tener en cuenta el efecto de la corriente en la rama de magnetización que resulta más importante con el incremento del entrehierro, del número de polos o de la resistencia rotórica.
Para mayor precisión se deberían tener en cuenta las pérdidas en el hierro, sin embargo la ligera mayor exactitud obtenida, no justifica la dificultad que implica su consideración.
En el octavo paso se desarrollan los siguientes cálculos. Para resbalamiento igual a 1 se calculan los valores de RF y XF que corresponden a la impedancia de secuencia directa (forward) del circuito que representa el paralelo de los parámetros del rotor y de la rama de magnetización.
Se determinan las siguientes relaciones:
R2RCR = 2 ´ RF
XXCR = X1 + 2 ´ XF
siendo X1 la reactancia de dispersión del devanado principal.
Estos términos resultan de utilidad para controlar rápidamente la aproximación de dos parámetros de fundamental importancia obtenidos por cálculo, la resistencia rotórica y la reactancia de dispersión, que no pueden ser verificados mediante ensayos directos.
Del mismo modo se determinan los valores de RB y XB para la secuencia inversa (back).
Se determinan para el devanado principal la impedancia vista desde sus bornes:
Para el devanado auxiliar se debe calcular el paso medio de bobina y se determina finalmente la longitud media del conductor y la resistencia del devanado auxiliar R1A, en forma similar a lo realizado para el devanado principal.
Análogamente para el devanado auxiliar se determinan RA y XA que es la impedancia vista desde sus bornes.
Con el valor de capacidad impuesto CMF se determina su reactancia XCAP y su resistencia RC (estimada en un 8% de XCAP)
Por último se calcula la resistencia total RAC del devanado de arranque incluyendo el capacitor, el valor de XA a partir de XXCR y X1A a partir de X1.
Determinación de la capacitancia para par máximo
Se debe calcular la capacitancia para par máximo, primero se determina la reactancia del capacitor:
y luego su capacitancia:
La experiencia demuestra que normalmente el valor de la capacidad necesaria en el circuito auxiliar para la condición de par máximo resulta muy grande para ser utilizada en motores, pero es de utilidad para calcular el par y la corriente de arranque.
Se puede de ese modo evaluar si el devanado auxiliar adoptado sirve para lograr los requerimientos de arranque impuestos. Se debe establecer un límite máximo para la capacidad, que no debe superar el 80 a 85% del valor antes calculado.
El valor promedio de la capacidad utilizada para el arranque de motores puede variar entre 25 a 455 m F.
Para un motor monofásico cuya potencia es del orden de 0.746 kW (1 HP), se requiere una capacidad grande, el valor de la componente resistiva RC se puede estimar adoptando un factor de pérdidas del 8%.
Determinación de la capacitancia para máximo par referido a la corriente de arranque
Para esta condición de cálculo se determina la reactancia del capacitor:

A partir de este resultado se puede determinar el valor de la capacitancia CST.
Determinación de la corriente de arranque
Se conoce la corriente en el devanado principal, la impedancia del devanado auxiliar es:

Si ambos arrollamientos tienen idéntica distribución, la reactancia de dispersión del devanado auxiliar se calcula con XA = A2 XTAP.
Normalmente el devanado auxiliar está concentrado en menos ranuras que el principal, presentando un mayor contenido de armónicos, que conducen a una mayor dispersión. Para tener en cuenta este efecto se multiplica la expresión anterior por un factor de corrección que es igual a la relación de los factores de distribución del devanado auxiliar y el principal elevado al cuadrado

Se determina la corriente y su ángulo para el devanado auxiliar y luego se la puede componer para determinar la corriente total que toma el motor de la red para esta condición de funcionamiento.
Cálculo de la performance del devanado de trabajo
Los cálculos de las condiciones de funcionamiento de este devanado se desarrollan en el paso noveno. Hasta este punto se han determinado por cálculo los siguientes valores:
- R1: resistencia devanado principal
- X1: reactancia devanado principal
- R2: resistencia rotórica
- X2: reactancia rotórica
- XM: reactancia de magnetización
- PERFER: pérdidas en el hierro (corona del estator más dientes)
- PSE: pérdidas en el hierro (pérdidas adicionales superficiales con la carga)
- PTOT: pérdidas en el hierro totales (con estas se calcula Z5)
- PMEC: pérdidas mecánicas por rozamiento y ventilación
- POT: potencia
- UU1: tensión
- F0: frecuencia
- NPOL: polos
Se necesita calcular el desempeño del motor, velocidad, potencia, par, rendimiento, factor de potencia, para cada posible condición de marcha.
La resolución del circuito equivalente de la figura 503 permite obtener estos valores.
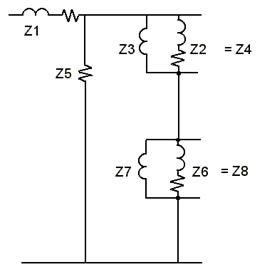
Observando la figura se identifican las siguientes impedancias:
- Z1: devanado principal
- Z5: representa las pérdidas en el hierro (R5 + j 0.0 = (UU1´ HKP)2 / PTOT)
- Z3, Z7: representan la excitación, y que se han dividido en dos mitades para cada secuencia
- Z2, Z6: rotor visto desde el devanado principal en secuencia directa y en secuencia inversa.
Para cada valor de resbalamiento S se determinan las resistencias de las impedancias Z2 y Z6, siendo respectivamente R2 / (2 ´ S) y R2 / (2 ´ (2 - S)), y luego se hace la reducción del circuito considerando los paralelos Z4 = Z2 // Z3 y Z8 = Z6 // Z7.
Luego se obtiene la serie Z9 = Z4 + Z8, que se está en paralelo con las pérdidas Z10 = Z9 // Z5.
Y finalmente se obtiene la serie con el devanado del estator Z11 = Z1 + Z10.
En este punto se pueden determinar las corrientes correspondientes a cada impedancia, y las tensiones presentes sobre cada una de ellas, los módulos y los correspondientes ángulos.
También se determinan las pérdidas Joule (R´ I2) en cada resistencia del circuito que se analiza, las pérdidas Joule en el estator PERPRI (Z1), en el hierro PERFER (Z5), las pérdidas en el rotor de secuencia directa y de secuencia inversa:

La potencia mecánica, a la que se le descuenta la pérdida por ventilación para obtener la potencia útil en el eje:

La pérdida de ventilación (y las pérdidas mecánicas por roce) se supone que crecen con el cubo de la velocidad:

Se determina entonces la potencia eléctrica que ingresa:
POTELE = POTMEC + PERSEC + PERPRI + POTFER + POTVEN
Se determina la velocidad RPP para cada valor de S, y se puede calcular el correspondiente par motor:
También se determinan otros valores de interés, rendimiento, factor de potencia, estado de carga en por unidad (potencia referida a la potencia nominal) y se identifica el par máximo, y el resbalamiento que corresponde a la potencia nominal.
Con estos resultados de cálculos se pueden determinar gráficos que muestran las distintas variables en función del resbalamiento, y que se comparan con los resultados de ensayos.
No olvidemos que estos cálculos son válidos para cada valor del resbalamiento cuando el arrollamiento de arranque no esta alimentado, y por consiguiente no son aplicables para determinar el arranque del motor, sino sólo a partir del instante en que el arrollamiento de arranque se desconecta.
Cálculo de la performance de arranque
Los cálculos que siguen se desarrollan en el paso décimo. El método que se emplea para analizar el comportamiento o perfomance del motor con ambos arrollamientos (trabajo y arranque) es muy utilizado tanto para motores monofásicos de fase dividida (split phase) como con arranque a capacitor.
Se inducen tensiones en el devanado principal (trabajo) por efecto de los campos del devanado auxiliar (arranque), análogamente se inducen tensiones en el auxiliar por los campos del principal.
Se requiere determinar separadamente los pares desarrollados por los campos directo e inverso.
La figura 504 corresponde al circuito equivalente de un motor con arranque a capacitor con el arrollamiento principal y auxiliar en cuadratura en el espacio, se observa la interacción de ambos circuitos alimentados simultáneamente.
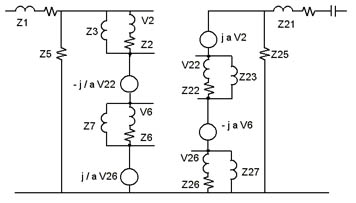
Se trata de un circuito equivalente para el motor con capacitor o de fase partida, de acuerdo con la teoría de los campos inversos.
Los campos directos producen un campo directo resultante y análogamente con los campos inversos.
Cada campo resultante induce una tensión en ambos devanados estatóricos (trabajo y arranque).
La resolución de este circuito permite obtener los valores de funcionamiento con ambos devanados conectados.
El esquema muestra dos circuitos reiteradamente acoplados, uno corresponde al arrollamiento principal, impedancias Z1, Z2, Z3, Z5, Z6, Z7, que ya conocemos y resolvimos, el otro es totalmente análogo, impedancias Z21, Z22, Z23, Z25, Z26, Z27, corresponde al arrollamiento de arranque.
Ambos circuitos están acoplados por generadores controlados que corresponden al efecto de la tensión V2 (presente en el devanado de marcha Z2) sobre el devanado de arranque jaV2, y V6 que es causa de -jaV6, hay además otras dos mutuas j / a que presentan las tensiones -j/aV22 y j/aV26.
El circuito es complicado, y debe resolverse como antes reiteradamente para todos los valores del resbalamiento S que interesan, se plantea entonces un sistema de ecuaciones que en base a impedancias de ramas permite encontrar las corrientes en todas las ramas en función de las tensiones de alimentación.
Observando la figura 505 se observan cuatro mallas y dos nodos, planteándose las siguientes ecuaciones (de Kirchoff):
- Malla 1:

- Malla 2:

- Malla 3:

- Malla 4:

- Nodo 5:

- Nodo 6:

Este sistema de ecuaciones se puede escribir en forma matricial de la siguiente manera:

que se resuelve obteniéndose las corrientes

Se han determinado las corrientes y en particular C3 y C4 que circulan en las impedancias que representan el brazo de excitación y el rotor (en secuencia directa e inversa).
Estas corrientes en las impedancias Z4, Z8, Z24 y Z28 (que son el paralelo de la impedancia del rotor y de excitación) generan la potencia del motor y las pérdidas.
La corriente en la rama de rotor se puede determinar haciendo CZ4 ´ Z4 / Z2.
Las pérdidas y la potencia que el rotor transmite están dadas por la potencia activa en la rama de rotor (única que incluye resistencia, y que depende del resbalamiento).
Este cálculo se repite para las restantes impedancias Z8, Z24 y Z28.
Luego se pueden plantear los mismos cálculos que ya se hicieron con sólo el bobinado de marcha, pero ahora considerando ambos bobinados, obteniéndose sucesivamente las pérdidas en el estator:

- Las pérdidas en el hierro, (suponiendo resistencia de pérdidas constante):

- Las pérdidas de ventilación y las pérdidas mecánicas:

- La potencia total absorbida se determina con tensión y corrientes:

- Las pérdidas en el rotor, para secuencia directa e inversa (resistencia equivalente por resbalamiento es la resistencia de pérdidas del rotor):

Finalmente se determina la potencia mecánica, a la que se le descuenta también la pérdida de ventilación para obtener la potencia útil en el eje:
POTMEC = POTELE - (PERPRI + PERSEC + POTFER + POTVEN)
Se determina la velocidad RPP = (1-SX)´ RPM para cada valor de S, y se puede calcular el correspondiente par motor en kgm:

- El rendimiento:
- El factor de potencia:
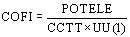
- La carga por unidad, como fracción de carga respecto de la nominal:

- Las tensiones en distintos puntos del modelo V2; V6, V22; V26; V5; V25

Análisis cualitativo del motor
Hemos considerado conveniente profundizar aspectos teóricos que están íntimamente vinculados con el funcionamiento del motor.
Para cualquier velocidad (resbalamiento) la tensión total inducida en el estator por el flujo de entrehierro es la suma de dos tensiones EF y EB como se observa en la figura 506 para un motor en particular; una tensión inducida por la componente directa del flujo de entrehierro y la otra por la componente inversa; para S = 1 estas tensiones son iguales.
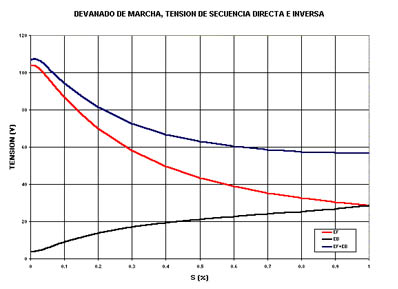
La tensión inducida por estas dos componentes es menor que la tensión aplicada debido a la caída D V en la impedancia primaria (Z1 = R1 + j X1).
En el estator solamente se tiene una corriente; para cualquier resbalamiento menor que 1, la tensión inducida por el campo directo EF es siempre mayor que la tensión inducida por el campo inverso EB como se observa en la figura.
Condiciones de funcionamiento en vacío
En un motor polifásico, cuando S = 0, el par desarrollado es nulo; por tanto un motor polifásico sin pérdidas por rozamiento ni ventilación puede girar a la velocidad sincrónica.
Para el motor monofásico en cambio, la corriente C2F resulta igual a cero, y no se desarrolla par directo como se observa en la figura 507 para el mismo motor; sin embargo, la resistencia en el circuito rotórico inverso resulta pequeña comparada con la reactancia de magnetización, por lo cual C2B resulta prácticamente igual a la corriente primaria.
En estas condiciones las pérdidas joule en el secundario son importantes, debido a la componente de campo inverso, desarrollando un importante par inverso.
Consecuentemente, un motor monofásico no puede girar en vacío a la velocidad sincrónica, aún sin pérdidas; tiene que tener suficiente resbalamiento para compensar el par inverso.
En un motor polifásico en vacío las pérdidas en el cobre del rotor son nulas, la diferencia con el motor monofásico en vacío son las importantes pérdidas en el cobre (debido al campo inverso) en el rotor.
También se observa en la figura 506 que la tensión aplicada a la reactancia de magnetización del campo inverso es muy baja, está prácticamente cortocircuitada por la rama en paralelo en el circuito equivalente figura 503, el flujo en el entrehierro es prácticamente flujo directo (flujo inverso casi nulo), condición que equivale a la del motor polifásico.
Condiciones de carga nominal
Si a un motor monofásico que está girando en vacío se le aplica una carga, la velocidad necesariamente se reduce y el resbalamiento aumenta. En el circuito equivalente esto significa que la resistencia del rotor en la rama directa RF decrece inversamente con el resbalamiento, pero la resistencia a través de la rama inversa RB se incrementa ligeramente, aunque no tan rápido como decrece RF como se observa en la figura 508.
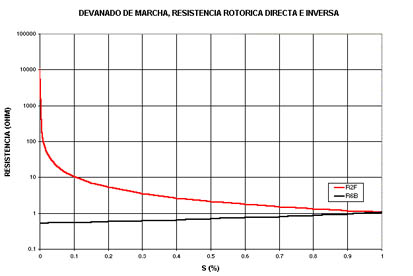
Consecuentemente, cuando se carga un motor monofásico, la impedancia total del campo inverso se reduce considerablemente.
Por lo tanto la corriente aumenta con la carga, como así también los pares directo e inverso, pero el par directo aumenta más, por lo cual el motor puede tomar más carga con un aumento del resbalamiento.
Veamos que ocurre con las tensiones directa e inversa y los flujos.
Como visto la suma de las tensiones decrece debido a que aumenta la caída en la impedancia primaria, la directa se reduce y la inversa aumenta, lo mismo ocurre con los flujos correspondientes.
Condiciones de rotor bloqueado
Cuando el rotor está bloqueado, S = 1, las tensiones inducidas por los campos directo e inverso son iguales, también las resistencias aparentes de los campos directo en inverso, y los pares producidos por ambos campos. Por lo tanto el par neto es nulo. De este modo el motor monofásico no tiene par de arranque.
La corriente que circula en el devanado estatórico del circuito equivalente produce una fmm pulsante en el tiempo pero estacionaria en el espacio. Cuando esta fmm se descompone en dos componentes rotantes (directa e inversa) ambas son iguales y giran en sentidos opuestos.
Sin embargo las fmms resultantes directa e inversa no son iguales, debido a que las fmms directa e inversa desarrolladas por el rotor son diferentes excepto cuando el rotor está detenido (S = 1).
Conclusiones
El diseño del devanado auxiliar y del capacitor de arranque de un motor consiste, en el mejor de los casos, en un proceso de aproximaciones sucesivas cuyo procedimiento puede variar para cada caso particular, resultando de utilidad las siguientes consideraciones:
Realizar el diseño del devanado auxiliar, utilizando una razonable distribución relativamente libre de armónicas. Llenar el espacio disponible en las ranuras, eligiendo el número de conductores y el tamaño del conductor de manera de obtener una relación de devanado A lo más próxima al valor 1,2 a 1,25.
Calcular la capacidad para el máximo par de arranque, juntamente con la corriente de arranque, par y tensión sobre el capacitor. Si el par de arranque no satisface los requerimientos con cierto margen, reducir el valor de A, y calcular el par máximo obtenido con el nuevo devanado hasta alcanzar el valor deseado.
Calcular la capacidad para el par máximo por amper, juntamente con la corriente de arranque, par y tensión sobre el capacitor.
Si el par de arranque resulta algo bajo, puede elegirse un valor de capacidad ligeramente mayor que la recientemente adoptada pero menor que la capacidad para par máximo.
Si el par y la corriente son demasiados altos, se puede reducir el valor de la capacidad.
Si resulta imposible encontrar una combinación que proporcione el par deseado sin exceder la corriente fijada, se pueden realizar dos acciones:
En primer lugar aumentar la resistencia rotórica y volver a calcular. Esto incrementa las pérdidas y reduce el par máximo, a menos que se reduzca el número de conductores del devanado principal.
En segundo lugar reducir la relación A y elegir un valor de capacidad que permita limitar la corriente de arranque al valor especificado. Presumiblemente se necesitará un valor de capacidad menor que la obtenida para máximo par por amper.
No se debe utilizar una capacidad mayor de la necesaria para obtener el máximo par de arranque.
La experiencia resulta importante para obtener el mejor diseño, las consideraciones citadas ayudarán al proyectista para alcanzar este objetivo.
Hemos completado el cálculo del motor monofásico, y comparando hemos notado que el motor monofásico, muy difundido, es de estudio mucho menos fácil que el motor asincrónico trifásico.
Es más, cuando uno pretende iniciarse en el cálculo del motor monofásico ya se debe haber alcanzado la categoría de buen calculista de motores trifásicos.
Además de conocerse bien la teoría de los motores trifásicos, también se debe conocer la teoría de los motores bifásicos, la teoría de los dos ejes, en fin es necesario haber estudiado y profundizado estos temas.
El cálculo asistido por computadora permite que el estudiante avance rápidamente en el perfeccionamiento de sus proyectos, por lo que puede alcanzar una calificación de experto en cálculo de motores trifásicos (no exageremos, motores simples).
Nos puede parecer que el problema presentado y resuelto no es de mucho interés, nos puede parecer de poca importancia, en comparación con los grandes motores, pero no nos engañemos, y démosle a estos humildes motores la importancia que realmente merecen, y que nos ha impulsado a avanzar en este desafío didáctico.
Los motores monofásicos tienen un mercado enorme por lo que una pequeña y mediana empresa (PYME) tiene posibilidades de iniciarse o introducirse... es lógico entonces preparar el programa de cálculo, entregarlo a los alumnos, quizás esta herramienta les sirva para iniciarse en la profesión haciendo construcciones nobles y bien estudiadas (quizás en poco tiempo, competitivas).
Nos pareció que la modernización de la materia y la puesta a disposición de las herramientas de cálculo exigía agregar a la serie de máquinas clásicas (correspondientes a la materia tradicional) este capítulo, el motor monofásico.
No se pretende que los alumnos hagan sobre este tema una experiencia de cálculo importante, en el curso normal, sólo introducirlos... a quienes realmente interese se le entregan todos los medios para estudiar con profundidad adecuada el tema, que complementado con ensayos y mediciones bien hechas permitiría un rápido y competitivo avance.
El estudio puede desarrollarse mejor y con tiempo adecuado como curso de especialización o introduciéndolo en un curso de postgrado de adecuada orientación.
El otro aspecto que mide la importancia de este tema es la efectivamente enorme cantidad de motores pequeños que rodea al hombre moderno y la gran cantidad de ellos que pueden ser monofásicos, heladera, aire acondicionado, extractor, ventilador, lavarropas, lavavajillas, freezer... y estos motores tienen una vida media de 10 años, su parque se renueva casi totalmente cada 10 años.
Para evaluar su cantidad seguramente podemos considerar un motor por habitante, pensando en 0,5 kW - 15 a 20 millones de kW (20000 MW), funcionando 2 a 3 horas diarias - 40000 MWh, con una carga media diaria de 2000 MW.
Podemos afirmar que muchos de estos motores son de mal rendimiento, si nuestro estudio sirviera para mejorar el rendimiento del 5 a 10 %, (siendo el rendimiento entre 50 a 70 %, se lo mejorará a valores de 60 a 75 %) objetivo que creemos fácil de cumplir, la reducción de carga que esto significa sería de unos 100 a 200 MW, es algo para pensar...
¡Un ahorro de esta magnitud es para realizar un profundo análisis tomado con gran entusiasmo político... pero nuestra fe en la mayoría es enorme! Este ahorro justifica la existencia de los centros de estudio, a los que no se les da la importancia que pueden y deben merecer.
Bibliografía
- [1] "THEORY AND DESIGN OF SMALL INDUCTION MOTORS" Veinott, Cyril G. McGraw Hill Book Co., 1959.
- [2] "HOW TO DESIGN A METRIC 1-PH MOTOR ON A PERSONAL COMPUTER" Veinott, Cyril Published, 1991.
- [3] "COSTRUZIONI ELETTROMECCANICHE" Enrico Di Pierro Volume secondo SIDEREA-ROMA, l986.
- [4] "ANALISIS DEL COMPORTAMENTO DEI LAMIERINI MAGNETICI NEI ALIMENTATI CON CONVERTITORI ELETTRONICI" M. Barisoni - F. Fiorillo, Giornata di Studio," Milano, 19 Maggio 1988.
- [5] "PROGETTAZIONE E CALCOLO DEI MOTORI ASINCRONI TRIFASI DE PICCOLA E MEDIA POTENZA" Marco Rossini Ed. Delfino - MILANO.

Copyright 2008 - 2012 INDUCOR INGENIERIA S.A. | Todos los derechos reservados | CCS | HTML