



Advanced
Cable Testing
CALCULO Y DISEÑO DE MAQUINAS ELECTRICAS
ANEXO CAPITULO 5 - ASPECTOS IMPORTANTES PARA LA ELECCION DE MOTORES DE JAULA
La norma NEMA MG-1 "Motores y Generadores" en los Estados Unidos y la IEC 60034-12 "Características de arranque de motores trifásicos de jaula de una velocidad" en Europa, definen una serie de diseños normalizados con diferentes características de par en función de la velocidad, para ayudar a elegir los motores más apropiados para la amplia variedad de aplicaciones en la industria.
Los motores trifásicos de inducción con rotor jaula de acuerdo con las características del par en función de la velocidad y de la corriente que toman en el arranque, se los clasifica en diseños o categorías cada una adecuada a un tipo de carga.
Según la terminología de la NEMA MG-1, la figura 280 muestra curvas típicas de par en función de la velocidad para algunos de los diseños, que corresponden a motores de 4 polos y para un rango de potencias entre 7.5 a 200 Hp.
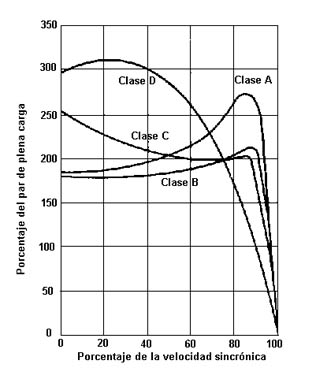
Veamos más en detalle lo indicado por esta norma en el punto 12.38 para el par de arranque de motores polifásicos medianos de jaula de servicio continuo, estableciendo letras que corresponden a distintos diseños de motores que tienen características de funcionamiento bien definidas.
Diseño clase A:
Son motores diseñados para arrancar con plena tensión desarrollando un par de arranque como se indica en la figura 281 para distintas potencias y velocidades y para frecuencias de 50 y 60 Hz, y un par máximo como se indica en la Tabla 1, con corrientes de arranque superiores a las establecidas en esta norma para motores B, C y D, y resbalamiento menor del 5%.
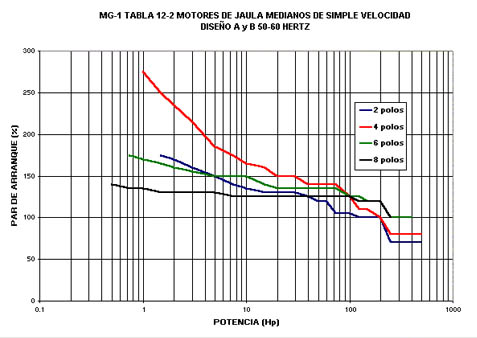
En la figura se observa que para 4 polos el par de arranque se incrementa notablemente para 1 Hp, a partir de 10 Hp el par se reduce con la potencia para todas las polaridades.
Este diseño tiene un rotor de jaula simple de baja resistencia con buen rendimiento en condiciones normales.
En general el par máximo supera 2,5 el par nominal y la corriente de arranque alcanza valores entre 5 y 8 veces la nominal.
En potencias menores de 5 kW (7,5 hp) las corrientes de arranque quedan dentro de los límites de los valores de pico que pueden tolerar los sistemas de distribución que los alimenta, en consecuencia se puede emplear el arranque directo.
Diseño clase B:
Son motores diseñados para arrancar con plena tensión desarrollando un par de arranque como se indica en la figura 281 para distintas potencias y velocidades y para frecuencias de 50 y 60 Hz, y un par máximo como se indica en la Tabla 1.
Adecuado para aplicaciones generales, como se observa en la figura tienen un par de arranque superior a los de clase A pero la corriente de arranque es menor (del orden del 75%).
Este tipo de motores tiene una reactancia de dispersión alta y se logra con rotores de doble jaula o jaula profunda.
El rendimiento y resbalamiento a plena carga son buenos, similares a los de clase A.
Al tener alta reactancia disminuye un poco el factor de potencia y baja el par máximo.
Tabla 1
| DISEÑO A y B, 50 y 60 Hertz - PAR MAXIMO (%) | ||||
| Hp | 2 polos | 4 polos | 6 polos | 8 polos |
| 0.5 | - | - | - | 225 |
| 0.75 | - | - | 275 | 220 |
| 1 | - | 300 | 265 | 215 |
| 1.5 | 250 | 280 | 250 | 210 |
| 2 | 240 | 270 | 240 | 210 |
| 3 | 230 | 250 | 230 | 205 |
| 5 | 215 | 225 | 215 | 205 |
| 7.5 | 200 | 215 | 205 | 200 |
| 10 | 200 | 200 | 200 | 200 |
| 125 | 200 | 200 | 200 | 200 |
| 150 | 200 | 200 | 200 | 200 |
| 200 | 200 | 200 | 200 | 200 |
| 250 | 175 | 175 | 175 | 175 |
| 300 | 175 | 175 | 175 | - |
| 350 | 175 | 175 | 175 | - |
| 400 | 175 | 175 | - | - |
| 500 | 175 | 175 | - | - |
Diseño clase C:
Son motores diseñados para arrancar con plena tensión, desarrollando un par de arranque como se indica en la figura 282 y un par máximo como muestra la Tabla 2, para aplicaciones que requieren un alto par y baja corriente de arranque. Se trata de rotores doble jaula con mayor resistencia que los de clase B.
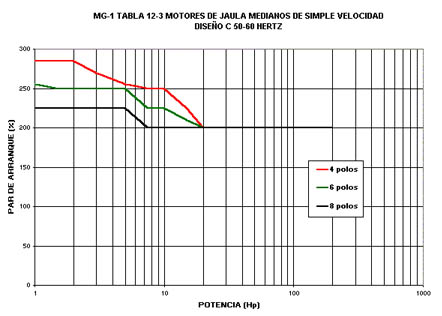
Tabla 2
| DISEÑO C, 50 y 60 Hertz - PAR MAXIMO (%) | ||||
| Hp | 4 polos | 6 polos | 8 polos | |
| 1 | 200 | 225 | 200 | |
| 1.5 | 200 | 225 | 200 | |
| 2 | 200 | 225 | 200 | |
| 3 | 200 | 225 | 200 | |
| 5 | 200 | 200 | 200 | |
| 7.5 | 200 | 190 | 190 | |
| 20 | 200 | 190 | 190 | |
| 25 | 200 | 190 | 190 | |
| 200 | 190 | 190 | 190 | |
Diseño clase D:
Son motores diseñados para arrancar con plena tensión, desarrollando un par de arranque que para motores de 4, 6 y 8 polos y potencia hasta 150 Hp, no debe ser menor de 275%, y alto resbalamiento mayor del 5%. Se trata de rotores de jaula con alta resistencia, por ejemplo para las barras se utiliza latón.
Tienen menor rendimiento en condiciones normales de funcionamiento. Se los utiliza para impulsar cargas intermitentes que requieren una gran aceleración (por ejemplo troqueladoras, cizallas).
Diseño clase E:
Son motores diseñados para arrancar con plena tensión, desarrollando un par de arranque como se indica en la figura 283 para distintas potencias y velocidades y para frecuencias de 50 y 60 Hz, y un par máximo como se indica en la Tabla 3.
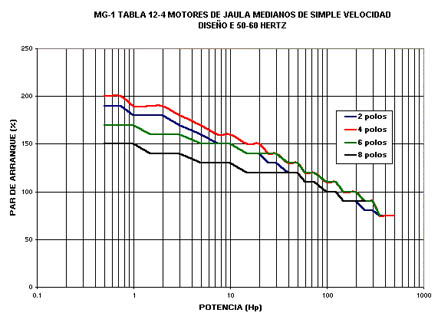
Adecuado para aplicaciones generales, con resbalamiento menor del 5%, también la norma fija valores mínimos del rendimiento para funcionamiento a plena carga.
Tabla 3
| DISEÑO E, 50 y 60 Hertz - PAR MAXIMO (%) | ||||
| Hp | 2 polos | 4 polos | 6 polos | 8 polos |
| 0.5 | 200 | 200 | 170 | 160 |
| 0.75 | 200 | 200 | 170 | 160 |
| 1 | 200 | 200 | 180 | 170 |
| 1.5 | 200 | 200 | 190 | 180 |
| 2 | 200 | 200 | 190 | 180 |
| 3 | 200 | 200 | 190 | 180 |
| 5 | 200 | 200 | 190 | 180 |
| 7.5 | 200 | 200 | 190 | 180 |
| 10 | 200 | 200 | 180 | 170 |
| 15 | 200 | 200 | 180 | 170 |
| 20 | 200 | 200 | 180 | 170 |
| 25 | 190 | 190 | 180 | 170 |
| 30 | 190 | 190 | 180 | 170 |
| 40 | 190 | 190 | 180 | 170 |
| 50 | 190 | 190 | 180 | 170 |
| 60 | 180 | 180 | 170 | 170 |
| 75 | 180 | 180 | 170 | 170 |
| 100 | 180 | 180 | 170 | 160 |
| 125 | 180 | 180 | 170 | 160 |
| 150 | 170 | 170 | 170 | 160 |
| 200 | 170 | 170 | 170 | 160 |
| 250 | 170 | 170 | 160 | 160 |
| 300 | 170 | 170 | 160 | - |
| 350 | 160 | 160 | 160 | - |
| 400 | 160 | 160 | - | - |
| 450 | 160 | 160 | - | - |
| 500 | 160 | 160 | - | - |
Veamos más en detalle la norma IEC 60034-12 aplicable a motores con tensión de alimentación hasta 1000 V, 50 o 60 Hz, arranque directo o estrella-triángulo, para servicio permanente, construidos para cualquier grado de protección, y distintos diseños.
Según la designación de esta norma, la figura 284 muestra curvas típicas de par en función de la velocidad para los diseños N y H.
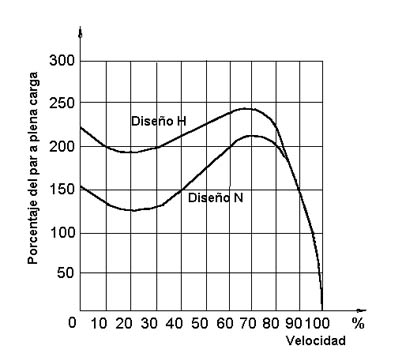
Diseño N:
Son motores de par de arranque normal, corriente en el arranque normal y de bajo resbalamiento. Constituyen la mayoría de los motores encontrados en el mercado y son aptos para ser utilizados para el accionamiento de cargas normales como por ejemplo bombas, máquinas operatrices, ventiladores.
En el punto 9 - Tabla 4 se indican para esta categoría los valores mínimos de par de arranque (Tl), acelerador (Tu) y máximo (Tb) en p.u. en función de la potencia para distintas velocidades.
En la figura 285 se muestra solamente el par de arranque en fución de la velocidad y potencia correspondientes a la Tabla 4.
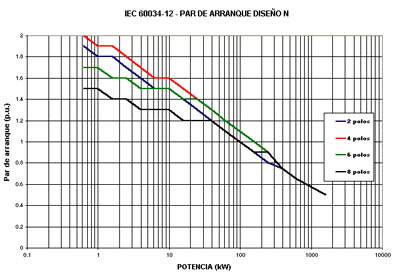
Tabla 4
| Potencia kW |
Número de polos | ||||||||||||||
| 2 | 4 | 6 | 8 | ||||||||||||
| Tl | Tu | Tb | Tl | Tu | Tb | Tl | Tu | Tb | Tl | Tu | Tb | ||||
| 0.4 £ Pn£ 0.63 | 1.9 | 1.3 | 2.0 | 2.0 | 1.4 | 2.0 | 1.7 | 1.2 | 1.7 | 1.5 | 1.1 | 1.6 | |||
| 0.63 < Pn£ 1.0 | 1.8 | 1.2 | 2.0 | 1.9 | 1.3 | 2.0 | 1.7 | 1.2 | 1.8 | 1.5 | 1.1 | 1.7 | |||
| 1.0 < Pn£ 1.6 | 1.8 | 1.2 | 2.0 | 1.9 | 1.3 | 2.0 | 1.6 | 1.1 | 1.9 | 1.4 | 1.0 | 1.8 | |||
| 1.6 < Pn£ 2.5 | 1.7 | 1.1 | 2.0 | 1.8 | 1.2 | 2.0 | 1.6 | 1.1 | 1.9 | 1.4 | 1.0 | 1.8 | |||
| 2.5 < Pn£ 4.0 | 1.6 | 1.1 | 2.0 | 1.7 | 1.2 | 2.0 | 1.5 | 1.1 | 1.9 | 1.3 | 1.0 | 1.8 | |||
| 4.0 < n£ 6.3 | 1.5 | 1.0 | 2.0 | 1.6 | 1.1 | 2.0 | 1.5 | 1.1 | 1.9 | 1.3 | 1.0 | 1.8 | |||
| 6.3 < Pn£ 10 | 1.5 | 1.0 | 2.0 | 1.6 | 1.1 | 2.0 | 1.5 | 1.1 | 1.8 | 1.3 | 1.0 | 1.7 | |||
| 10 < Pn£ 16 | 1.4 | 1.0 | 2.0 | 1.5 | 1.1 | 2.0 | 1.4 | 1.0 | 1.8 | 1.2 | 0.9 | 1.7 | |||
| 16 < Pn£ 25 | 1.3 | 0.9 | 1.9 | 1.4 | 1.0 | 1.9 | 1.4 | 1.0 | 1.8 | 1.2 | 0.9 | 1.7 | |||
| 25 < Pn£ 40 | 1.2 | 0.9 | 1.9 | 1.3 | 1.0 | 1.9 | 1.3 | 1.0 | 1.8 | 1.2 | 0.9 | 1.7 | |||
| 40 < Pn£ 63 | 1.1 | 0.8 | 1.8 | 1.2 | 0.9 | 1.8 | 1.2 | 0.9 | 1.7 | 1.1 | 0.8 | 1.7 | |||
| 63 < Pn£ 100 | 1.0 | 07 | 1.8 | 1.1 | 0.8 | 1.8 | 1.1 | 0.8 | 1.7 | 1.0 | 0.7 | 1.6 | |||
| 100 < Pn£ 160 | 0.9 | 0.7 | 1.7 | 1.0 | 0.8 | 1.7 | 1.0 | 0.8 | 1.7 | 0.9 | 0.7 | 1.6 | |||
| 160 < Pn£ 250 | 0.8 | 0.6 | 1.7 | 0.9 | 0.7 | 1.7 | 0.9 | 0.7 | 1.6 | 0.9 | 0.7 | 1.6 | |||
| 250 < Pn£ 400 | 0.75 | 0.6 | 1.6 | 0.75 | 0.6 | 1.6 | 0.75 | 0.6 | 1.6 | 0.75 | 0.6 | 1.6 | |||
| 400 < Pn£ 630 | 0.65 | 0.5 | 1.6 | 0.65 | 0.5 | 1.6 | 0.65 | 0.5 | 1.6 | 0.65 | 0.6 | 1.6 | |||
| 630 < Pn£ 1600 | 0.5 | 0.3 | 1.6 | 0.5 | 0.3 | 1.6 | 0.5 | 0.3 | 1.6 | 0.5 | 0.3 | 1.6 | |||
Estos motores deben ser capaces de garantizar dos arranques sucesivos (con una detención entre ambos arranques) a partir de la condición a temperatura ambiente y un arranque después de estar funcionando en condiciones nominales.
Para este diseño pero con tipo de protección "e - seguridad aumentada", en la Tabla 5 se indican los valores mínimos de par de arranque (Tl), acelerador (Tu) y máximo (Tb) en p.u. en función de la potencia para distintas velocidades.
En la figura 286 se muestra solamente el par de arranque en fución de la velocidad y potencia correspondientes a la Tabla 5.
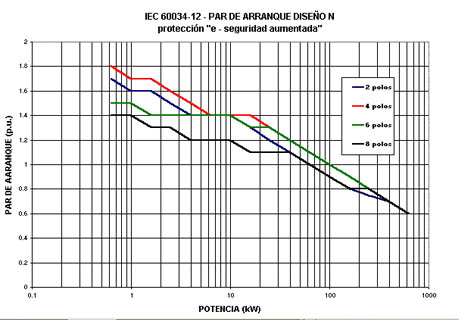
Tabla 5
| Potencia kW |
Número de polos | ||||||||||||||
| 2 | 4 | 6 | 8 | ||||||||||||
| Tl | Tu | Tb | Tl | Tu | Tb | Tl | Tu | Tb | Tl | Tu | Tb | ||||
| 0.4 £ Pn£ 0.63 | 1.7 | 1.1 | 1.8 | 1.8 | 1.2 | 1.8 | 1.5 | 1.1 | 1.6 | 1.4 | 1.0 | 1.6 | |||
| 0.63 < Pn£ 1.0 | 1.6 | 1.1 | 1.8 | 1.7 | 1.2 | 1.8 | 1.5 | 1.1 | 1.6 | 1.4 | 1.0 | 1.6 | |||
| 1.0 < Pn£ 1.6 | 1.6 | 1.1 | 1.8 | 1.7 | 1.2 | 1.8 | 1.4 | 1.0 | 1.7 | 1.3 | 1.0 | 1.6 | |||
| 1.6 < Pn£ 2.5 | 1.5 | 1.0 | 1.8 | 1.6 | 1.1 | 1.8 | 1.4 | 1.0 | 1.7 | 1.3 | 1.0 | 1.6 | |||
| 2.5 < Pn£ 4.0 | 1.4 | 1.0 | 1.8 | 1.5 | 1.1 | 1.8 | 1.4 | 1.0 | 1.7 | 1.2 | 0.9 | 1.6 | |||
| 4.0 < Pn£ 6.3 | 1.4 | 1.0 | 1.8 | 1.4 | 1.0 | 1.8 | 1.4 | 1.0 | 1.7 | 1.2 | 0.9 | 1.6 | |||
| 6.3 < Pn£ 10 | 1.4 | 1.0 | 1.8 | 1.4 | 1.0 | 1.8 | 1.4 | 1.0 | 1.6 | 1.2 | 0.9 | 1.6 | |||
| 10 < Pn£ 16 | 1.3 | 0.9 | 1.8 | 1.4 | 1.0 | 1.8 | 1.3 | 1.3 | 1.6 | 1.1 | 0.8 | 1.6 | |||
| 16 < Pn£ 25 | 1.2 | 0.9 | 1.7 | 1.3 | 1.0 | 1.7 | 1.3 | 1.3 | 1.6 | 1.1 | 0.8 | 1.6 | |||
| 25 < Pn£ 40 | 1.1 | 0.8 | 1.7 | 1.2 | 0.9 | 1.7 | 1.2 | 0.9 | 1.6 | 1.1 | 0.8 | 1.6 | |||
| 40 < Pn£ 63 | 1.0 | 0.7 | 1.6 | 1.1 | 0.8 | 1.6 | 1.1 | 0.8 | 1.6 | 1.0 | 0.7 | 1.6 | |||
| 63 < Pn£ 100 | 0.9 | 0.65 | 1.6 | 1.0 | 0.8 | 1.6 | 1.0 | 0.8 | 1.6 | 0.9 | 0.7 | 1.6 | |||
| 100 < Pn£ 160 | 0.8 | 0.6 | 1.6 | 0.9 | 0.7 | 1.6 | 0.9 | 0.7 | 1.6 | 0.8 | 0.6 | 1.6 | |||
| 160 < Pn£ 250 | 0.75 | 0.55 | 1.6 | 0.8 | 0.6 | 1.6 | 0.8 | 0.6 | 1.6 | 0.8 | 0.6 | 1.6 | |||
| 250 < Pn£ 400 | 0.7 | 0.55 | 1.6 | 0.7 | 0.55 | 1.6 | 0.7 | 0.55 | 1.6 | 0.7 | 0.55 | 1.6 | |||
| 400 < Pn£ 630 | 0.6 | 0.45 | 1.6 | 0.6 | 0.45 | 1.6 | 0.6 | 0.4 | 1.6 | 0.6 | 0.4 | 1.6 | |||
Diseño NY:
Son similares a los de diseño N pero para ser utilizados con arranque en conexión estrella-triángulo. Se requiere un par antagónico reducido debido a el par de arranque en conexión estrella puede ser insuficiente para acelerar algunas cargas a una velocidad aceptable.
Se debe tener en cuenta que el número de arranques debe ser minimizado puesto que afectan la vida del motor.
Diseño H:
Son motores con par de arranque alto, corriente de arranque normal, y bajo resbalamiento. Utilizados para cargas que exigen mayor par de arranque como por ejemplo zarandas, transportadores, cargadores, cargas con inercia alta, molinos, etc.
En el punto 9 - Tabla 6 se indican para esta categoría los valores mínimos de par de arranque (Tl), acelerador (Tu) y máximo (Tb) en p.u. en función de la potencia para distintas velocidades.
En la figura 287 se muestra solamente el par de arranque en fución de la velocidad y potencia correspondientes a la Tabla 6.
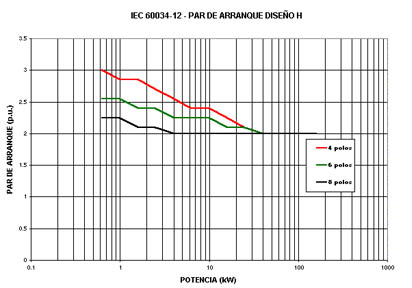
Tabla 6
| Potencia kW |
Número de polos | ||||||||||
| 4 | 6 | 8 | |||||||||
| Tl | Tu | Tb | Tl | Tu | Tb | Tl | Tu | Tb | |||
| 0.4 £ Pn£ 0.63 | 3.0 | 2.1 | 2.1 | 2.55 | 1.8 | 1.9 | 2.25 | 1.65 | 1.9 | ||
| 0.63 < Pn£ 1.0 | 2.85 | 1.95 | 2.0 | 2.55 | 1.8 | 1.9 | 2.25 | 1.65 | 1.9 | ||
| 1.0 < Pn£ 1.6 | 2.85 | 1.95 | 2.0 | 2.4 | 1.65 | 1.9 | 2.1 | 1.5 | 1.9 | ||
| 1.6 < Pn£ 2.5 | 2.7 | 1.8 | 2.0 | 2.4 | 1.65 | 1.9 | 2.1 | 1.5 | 1.9 | ||
| 2.5 < Pn£ 4.0 | 2.55 | 1.8 | 2.0 | 2.25 | 1.65 | 1.9 | 2.0 | 1.5 | 1.9 | ||
| 4.0 < Pn£ 6.3 | 2.4 | 1.65 | 2.0 | 2.25 | 1.65 | 1.9 | 2.0 | 1.5 | 1.9 | ||
| 6.3 < Pn£ 10 | 2.4 | 1.65 | 2.0 | 2.25 | 1.65 | 1.9 | 2.0 | 1.5 | 1.9 | ||
| 10 < Pn£ 16 | 2.25 | 1.65 | 2.0 | 2.1 | 1.5 | 1.9 | 2.0 | 1.4 | 1.9 | ||
| 16 < Pn£ 25 | 2.1 | 1.5 | 1.9 | 2.1 | 1.5 | 1.9 | 2.0 | 1.4 | 1.9 | ||
| 25 < Pn£ 40 | 2.0 | 1.5 | 1.9 | 2.0 | 1.5 | 1.9 | 2.0 | 1.4 | 1.9 | ||
| 40 < Pn£ 160 | 2.0 | 1.4 | 1.9 | 2.0 | 1.4 | 1.9 | 2.0 | 1.4 | 1.9 | ||
Nota 2: los valores de Tl son 1.5 veces los correspondientes al diseño N, pero no menores de 2.0.
Nota 3: los valores de Tu son 1.5 veces los correspondientes al diseño N, pero no menores de 1.4.
Nota 4: Los valores de Tb son iguales a los correspondientes al diseño N, pero no menores de 1.9 y a los valores de Tu.
Estos motores también deben ser capaces de garantizar dos arranques sucesivos (con una detención entre ambos arranques) a partir de la condición a temperatura ambiente y un arranque después de estar funcionando en condiciones nominales.
Diseño HY:
Son similares a los de diseño H pero para ser utilizados con arranque en conexión estrella-triángulo. Se requiere un par antagónico reducido debido a el par de arranque en conexión estrella puede ser insuficiente para acelerar algunas cargas a una velocidad aceptable.
Se debe tener en cuenta que el número de arranques debe ser minimizado puesto que afectan la vida del motor.
Conclusión
Con los gráficos obtenidos para los distintos diseños según la norma NEMA MG-1 y la norma IEC 60034-12 se puede comparar el comportamiento de los motores para los distintos casos analizados y su eventual equivalencia.

Copyright 2008 - 2012 INDUCOR INGENIERIA S.A. | Todos los derechos reservados | CCS | HTML