



Advanced
Cable Testing
CALCULO Y DISEÑO DE MAQUINAS ELECTRICAS
CAPITULO 19 - INFLUENCIA DE LA SATURACION DURANTE EL PROCESO DE ARRANQUE DE MOTORES
Introducción
El cálculo de motores en la bibliografía clásica supone que las reactancias, (permeancias) son constantes. Con esta hipótesis se desarrolló el programa de cálculo de motores asincrónicos "MOTOCA".
Uno de los resultados del cálculo que permite apreciar las características funcionales del motor es el diagrama de corrientes (circular) que se hace partiendo de la hipótesis que las reactancias son constantes.
Cuando se realiza el ensayo de rotor bloqueado (cortocircuito) si se hace con tensión reducida se observan valores que se aproximan a los resultados del cálculo, ya que las corrientes son moderadas, y finalmente se construye para jaula simple y rotor bobinado un diagrama circular que también aproxima el obtenido mediante el cálculo (salvo errores justificados en diferencias constructivas y simplificaciones de cálculo).
Es difícil realizar el ensayo de rotor bloqueado a plena tensión pero si se hiciera, se observaría una mayor corriente de la que corresponde por el cálculo (manteniendo la hipótesis de reactancias constantes) o por el ensayo con tensión reducida.
Este efecto, que se debe a la saturación, intentamos profundizarlo.
Cuando se observan todas las magnitudes en juego, con objeto de construir las características del motor, se nota que particularmente la corriente de arranque, el par de arranque, el par máximo, dependen mucho de los valores de las reactancias correspondientes a los flujos de dispersión del circuito magnético.
Saturación
Es conocido que la reactancia de dispersión no es constante, y que varía en correspondencia con la corriente que la máquina absorbe, que a su vez varía durante el proceso de arranque.
Con el aumento de la corriente se produce saturación de los circuitos magnéticos en los cuales se establece flujo disperso, observándose en algunos casos notable disminución de la permeancia.
En consecuencia se tiene un valor de corriente de cortocircuito (de arranque) superior a aquél que se tendría si la reactancia se mantuviese constante.
Si se determina la corriente de arranque con el valor de los parámetros de funcionamiento nominal (sin tener en cuenta los efectos de la saturación) se obtiene una corriente que difiere de la obtenida en un ensayo de arranque directo a plena tensión, esta diferencia resulta de interés para quien tiene que evaluar este efecto al verificar el cálculo de un motor (pretendiendo resultados que representen el funcionamiento real).
Este efecto constituye un fenómeno que no puede ser en ningún caso despreciado en la determinación de las características de arranque y particularmente para valores altos del resbalamiento, mientras la corriente es mucho mayor que la nominal.
Para poder considerar la saturación es necesario separar los circuitos de dispersión en sus partes sensibles y no sensibles a la misma.
Al producirse la saturación, la reactancia de dispersión disminuye, reduciéndose en forma importante en función del aumento de la corriente durante el arranque con respecto al valor nominal.
Como consecuencia de ello el diagrama polar (circular) de corriente (para motores de rotor bobinado o jaula simple) deja de ser circular, y los apartamientos para los altos resbalamientos son tales que hacen inaceptable la hipótesis de que los parámetros son constantes.
Flujos de dispersión
Los flujos de dispersión que participan en el cálculo de la reactancia de dispersión estatórica y rotórica son los siguientes:
- Flujo disperso de ranura
- Flujo disperso de entrehierro
- Flujo disperso de las cabezas de bobinas de estator y rotor (bobinado) o de los anillos (motor de rotor jaula)
Los dos primeros flujos se cierran esencialmente en el hierro. En particular parte de ellos atraviesa la saliente de los dientes que, debido a su pequeña sección, se saturan.
El tercero (disperso en cabezas de bobinas o anillos) no es afectado por la saturación, debido a que se desarrolla exclusivamente en el aire.
Una parte del flujo disperso de ranura se cierra a través de la base de la saliente del diente, como se observa en la figura 1232, dividiéndose en tres caminos que son:
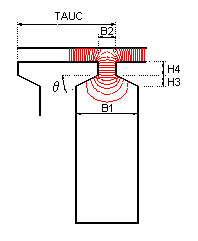
- El flujo que atraviesa dos veces el entrehierro
- El flujo que atraviesa el espacio de aire constante B2
- El flujo que atraviesa el espacio de aire variable desde B2 hasta B3
La saturación en la base de la saliente del diente se alcanza cuando el valor de la inducción en la sección de pasaje de estos tres flujos dispersos es del orden de 1.9 a 2 T.
A partir de la expresión propuesta por Alger que vincula la inducción con el valor de corriente en la ranura estatórica, para un valor de inducción igual a 1.95 T, se puede determinar el valor de la corriente para la que se presenta saturación:

donde:
Q1 : ranuras estatóricas
N1 : conductores por fase
NFAS : número de fases
K3 : factor de corrección de acortamiento
FCAR : factor de Carter
K : ancho a 1/3 diente/ancho cabeza
DELTA : entrehierro
tgJ : 2 ´ H3 / (B3 - B2)
todas las longitudes en mm.
Esta expresión pone en evidencia cuales son las magnitudes que tienen mayor influencia en el fenómeno que se considera.
En particular la corriente que provoca la saturación de las cabezas de los dientes aumenta al disminuir el número de conductores por ranura; se incrementa también con el aumento de la apertura de la ranura (B2) y con la longitud del entrehierro; finalmente tiene particular influencia el ángulo de inclinación de la cabeza de los dientes (ver figura 1).
La corriente para la cual se presenta saturación de la ranura estatórica, debe referirse a la corriente que se tiene en la ranura en condiciones normales de funcionamiento, teniendo en cuenta para ello el tipo de conexión y el número de vías externas de corriente (NVIAS).
Análogamente se puede calcular para el rotor tanto bobinado como jaula, el valor de corriente para la que se presenta saturación. Se recuerda que para rotor jaula el número de fases es igual al número de ranuras rotóricas, el número de conductores por fase igual a 1 y el factor de acortamiento igual a 1.
Para rotor jaula la corriente para la cual se presenta saturación debe referirse a la corriente de barra en condiciones normales de funcionamiento.
Para el cálculo de la corriente propuesta por Alger, el programa MOTOCA tiene en cuenta el tipo de ranura que se utiliza tanto para el estator como para el rotor.
Para las ranuras tipo 2, 3, 4 y 6 el ángulo q se calcula en base a las dimensiones correspondiente de cada ranura como arriba indicado.
Para la ranura tipo 5 circular se hace q = 30 grados, (que corresponde a suponer una forma hexagonal para la barra).
Para la ranura tipo 1 abierta de caras paralelas el segmento correspondiente a H2 se traslada hacia arriba, entonces tiene sentido decir que H4 = H4 + H2, el ángulo q = 60 grados.
Cuando el valor K resulta mayor que 1 se lo fuerza a 1 con lo cual la expresión propuesta por Alger se reduce:

Ensayos
El diagrama circular se construye partiendo de algunos ensayos realizados en condiciones que no siempre corresponden con las reales de funcionamiento.
El punto de cortocircuito se determina frecuentemente con tensión reducida, en consecuencia la corriente de arranque es reducida, y no se producen fenómenos de saturación. Si el motor es de simple jaula (o bobinado) el diagrama de corrientes que se obtiene es circular.
En la medida que el ensayo de cortocircuito se hace con corriente más próxima a la de arranque (a tensión nominal) si se produce saturación el punto de cortocircuito cambia de posición en el diagrama.
Este cambio se justifica con la variación de la reactancia, y en consecuencia cambian los valores de corriente, par, factor de potencia, etc.
El diagrama circular se considera válido en la zona de la corriente nominal (bajo resbalamiento), en la zona de corriente de arranque (a tensión nominal) el diagrama resulta sensiblemente distinto del círculo.
La norma IEC 60034-1 define como par a rotor bloqueado el mínimo par desarrollado en el eje, para cualquier posición angular del rotor con la tensión de alimentación y frecuencia nominal, análogamente define como corriente a rotor bloqueado el mayor valor eficaz de corriente permanente que el motor toma de la red, para las mismas condiciones antes señaladas.
La norma IEEE Std 112 recomienda realizar el ensayo de rotor bloqueado, cuando es posible, con tensión y frecuencia nominales, debido a que la corriente no es directamente proporcional a la tensión aplicada como consecuencia de la variación de la reactancia por la saturación de los circuitos de flujo disperso.
El ensayo de rotor bloqueado de un motor de inducción con alimentación polifásica con tensión próxima a la nominal implica una solicitación mecánica excepcional, como así también una elevada exigencia térmica, por lo que conviene tener presente algunas consideraciones.
La máquina deberá estar a temperatura ambiente antes del ensayo. Las lecturas de corriente y par se deben realizar lo más rápidamente posible, la sobreelevación de temperatura de la máquina no debería exceder en más de 40 ° C los límites fijado por las normas.
Las lecturas deben ser realizadas dentro de los 5 seg después de aplicada la tensión para motores de hasta 7.5 kW y dentro de los 10 seg para motores de mayor potencia.
Verificar el sentido de giro antes del ensayo y los medios mecánicos de fijación del rotor para evitar posibles daños al personal y a las instalaciones.
La norma IRAM 2125 recomienda que la corriente de arranque se determine cuando es posible, a tensión y frecuencia nominales, en particular para determinar el par de arranque se debe aplicar una tensión de 75 a 100% de la nominal, a frecuencia nominal y durante un lapso no mayor de 5 a 10 seg.
Se recomienda repetir esta prueba para distintas posiciones del rotor respecto del estator girándolo hacia uno y otro lado de la posición inicial, para tener en cuenta el efecto producido por las ranuras (por variación de la reluctancia en el entrehierro).
Entre cada ensayo se deja transcurrir un lapso suficiente como para que la temperatura del estator descienda prácticamente hasta la temperatura ambiente (se debe verificar la temperatura midiendo la resistencia del devanado).
Método de cálculo
El problema de determinar analíticamente el valor de la reactancia de dispersión teniendo en cuenta la saturación resulta extremadamente difícil.
A continuación con la metodología desarrollada por Agarwall y Alger, (en principio más compleja que otras pero que resulta ciertamente significativa), se encara la determinación de la influencia de la saturación, lo que requiere descomponer la reactancia de dispersión en una componente no saturable y otra influenciada por la saturación.
para I > Is 
para I < Is 
donde Xns es la parte de reactancia que no experimenta los efectos de la saturación y Xs es la parte que si se ve afectada, Is es el valor de corriente a partir del cual se observa el efecto de saturación, I es la corriente presente en el momento en que se analiza el efecto.
Al aumentar la corriente, se saturan los circuitos magnéticos de dispersión, y disminuye la reactancia efecto que conduce a un ulterior aumento de la corriente, por lo que el cálculo debe plantearse en modo iterativo.
Para poder calcular efectivamente se debe encontrar el valor de Is a partir del cual se observa el efecto de saturación, normalmente comprendido entre la corriente nominal del motor y el doble.
Debido al flujo principal (no disperso), la inducción en los dientes resulta alta, por este motivo podría no parecer correcto afirmar que la componente de la reactancia Xns permanece constante, pero como normalmente la corriente de arranque no supera el valor de 5 a 6 veces la corriente nominal, la experiencia indica que la fórmula utilizada no da errores notables.
Además se debe conocer cual es la parte de la reactancia total que se satura, es decir, la relación entre Xs y X.
Rutinas de cálculo y programas
Siendo la función del programa MOTOCA básicamente didáctica, preferimos no desarrollar dentro de este programa la consideración de los fenómenos de saturación, para no dificultar la comprensión de lo que se hace al desarrollar los cálculos. En efecto, es difícil introducir los datos de la saturación dentro del cálculo de dimensionamiento del motor y avanzar en el cálculo considerándola.
El camino propuesto es extraer de la ejecución del programa de dimensionamiento los valores de los parámetros de reactancia calculados, separando de ellos las partes sensibles a la saturación, tarea que queda incluida en MOTOCA, como también la determinación de la corriente de Alger.
La parte de la reactancia que se satura tanto para el estator como para el rotor, se determina en base a la permeancia de ranura, la dispersión armónica y la dispersión de la cabeza de las bobinas o de los anillos (considerando el tipo de ranura).
La saturación incide en una parte de la permeancia de ranura (la parte en aire) y en la dispersión armónica. Haciendo la relación entre estos valores calculados, se obtiene el factor en p.u. que tiene en cuenta la parte sensible al fenómeno de saturación.
Para rotor bobinado y de jaula simple es fácil interpretar lo arriba indicado, para rotor de doble jaula el efecto de saturación sólo se presenta en la jaula externa y para el de ranura profunda se lo asimila a uno de jaula simple, pero debe tenerse en cuenta que en este caso la evaluación de la parte saturable se hace no considerando la distribución no uniforme de la corriente durante el proceso de arranque.
Se ha incorporado la rutina Alger que calcula la corriente de ranura estatórica y rotórica para la cual se presenta saturación.
En consecuencia el cálculo prosigue sin considerar la saturación, en el informe de cálculo se imprimen todos los valores que permiten construir el circuito equivalente, teniendo en cuenta los fenómenos de saturación.
El programa "MOTCAR" es un simulador que en base a los datos del circuito equivalente construye el diagrama circular, y los diagramas de corriente y par en función de la velocidad, pudiendo tenerse o no saturación según los datos que se fijen. Veamos que hace este programa.
Cuando calcula determina a partir de los parámetros R y X un valor de corriente I, cuando este valor supera la corriente de referencia Is (Alger, o el valor que se desea) el cálculo deberá tener en cuenta el efecto de saturación, por lo tanto se determinan los valores de X afectados por la saturación y con estos valores corregidos se recalcula la corriente obteniéndose por sucesivas iteraciones los valores definitivos de reactancia y corrientes.
En rigor el cálculo es más sutil, con la corriente de referencia que entra al modelo (circuito equivalente), a partir de la cual se aprecia la saturación, se determinan las corrientes en las distintas ramas del circuito.
El cálculo de los efectos de saturación para las reactancias de estator y rotor se hace utilizando en cada caso la corriente que corresponde a la reactancia que se considera, referida a la corriente que circula por el elemento en el momento que se presenta saturación, de este modo el efecto de saturación puede ser distinto para el estator y el rotor.
En la tabla de resultados de la ejecución del programa se indican como varían las reactancias afectadas por la saturación con el resbalamiento o velocidad, aunque en rigor su variación es causada por la corriente.
Además este programa permite variar la tensión de alimentación del motor y se puede también observar como varía el efecto de la saturación por esta causa, simulando por ejemplo un funcionamiento con tensión reducida.
Efectos de saturación
El fenómeno de saturación de los circuitos de dispersión se puede aprovechar para el diseño de motores asincrónicos para obtener prefijadas características de arranque (par y corriente).
Pudiéndose tolerar un aumento de la corriente de arranque, se utilizan los fenómenos de saturación para lograr un aumento del factor de potencia en arranque y un aumento del par de arranque.
En la tabla 1 se observan los resultados de cálculo de tres motores de 15 kW; 380 V; 50 Hz; 4 polos, que tienen el mismo estator y rotores de jaula simple, profunda y doble respectivamente, calculados con el programa "MOTOCA", que determina tanto para el estator como para el rotor en valor relativo, la parte de reactancia que puede experimentar efectos de saturación.
Se observa que en los tres motores el rendimiento calculado se mantiene prácticamente constante, mientras que el factor de potencia para los rotores de jaula profunda y de doble jaula resulta ligeramente inferior, razón por la cual la corriente nominal es levemente mayor.
Con el programa "MOTCAR" y solamente para los casos de jaula simple y doble jaula, se calculó el efecto de la saturación que se presenta a partir de corriente dos veces la nominal, la tabla muestra los valores comparativos de corriente de arranque y par de arranque.
Tabla 1 - Valores comparativos
| Tipo de jaula: | simple | profunda | doble |
| Sin saturación: | |||
| Corriente nominal (A) | 27,2 | 29,6 | 29,2 |
| Corriente de arranque (A) | 139,7 | 100,3 | 130 |
| Par de arranque (kgm) | 8,31 | 11,16 | 23,9 |
| Resbalamiento nominal (%) | 2,8 | 3,45 | 2,47 |
| Con saturación: | |||
| Corriente de arranque (A) | 239 | 146 | |
| Par de arranque (kgm) | 24,89 | 32,5 |
Para el motor de jaula profunda el circuito equivalente que se debe utilizar cuando aparecen los fenómenos de saturación no está resuelto por ahora.
De los resultados obtenidos se observa que el efecto de la saturación es más notable en el motor de jaula simple, y suponemos que esta afirmación resultará válida también para el motor de jaula profunda respecto del doble jaula, de aquí la importancia de retomar este tema en el futuro.
La saturación se presenta independientemente del tamaño (potencia) del motor, pero se considera que en motores de potencia pequeña (algunos kW) el efecto resulta de mucho interés para el diseño.
Efectivamente para estos casos se puede tolerar un aumento de la corriente de arranque, que provoca los fenómenos de saturación, acompañados por un aumento del factor de potencia de cortocircuito y un notable incremento del par de arranque.
Con una jaula simple y el efecto de saturación se pueden obtener características que se aproximan a las de un motor de doble jaula, lográndose satisfacer la necesidad de que la forma constructiva del rotor sea simple para contener su costo.
Continuar con el análisis de todas las alternativas parecería demasiado extenso, y no aportaría elementos para una mejor comprensión del fenómeno que se analiza, razón por la cual se concentra la atención sobre los motores de jaula simple.
La tabla 2 muestra los casos calculados con "MOTCAR" y los valores correspondientes de los parámetros arriba indicados, para el caso 1 no hay efectos de saturación por lo que no tienen significado los parámetros.
Las partes de reactancia que experimentan efectos de saturación se denominan X1SATU y XRSATU para el estator y el rotor respectivamente.
Con C1SATU y CRSATU se indican también para el estator y el rotor, los valores de corriente relativos a la corriente correspondiente al valor nominal a partir de los cuales pueden aparecer efectos de saturación.
Tabla 2 - Valores utilizados para los cálculos
| Caso | Tensión de alimentación | X1SATU | C1SATU | XRSATU | CRSATU |
| (V) | p.u. | p.u. | p.u. | p.u. | |
| 1 | 380 | - | - | - | - |
| 2 | 380 | 0.543 | 4.0 | 0.643 | 4.0 |
| 3 | 380 | 0.543 | 2.0 | 0.643 | 2.0 |
| 4 | 380 | 0.543 | 2.0 | - | - |
| 5 | 380 | - | - | 0.643 | 2.0 |
| 6 | 380 | 0.27 | 2.0 | 0.32 | 2.0 |
El programa "MOTCUR" permite comparar las características de par y corriente entre dos motores.
La tabla 3 reúne los valores representativos de los distintos casos.
| Caso | Par arranque | Par máximo | Resbalamiento máximo | Corriente arranque | Valores relativos | ||
| (kgm) | (kgm) | (%) | (A) | Pa/Pnom | Ca/Cnom | ||
| 1 | 8.31 | 26.2 | 15 | 139.7 | 0.83 | 5.3 | |
| 2 | 13.9 | 26.2 | 15 | 179.5 | 1.39 | 6.7 | |
| 3 | 24.9 | 40.6 | 30 | 239.0 | 2.49 | 9.0 | |
| 4 | 12.1 | 30.1 | 20 | 168.5 | 1.21 | 6.3 | |
| 5 | 13.5 | 31.3 | 20 | 176.1 | 1.35 | 6.6 | |
| 6 | 12.7 | 30.6 | 20 | 171.8 | 1.27 | 6.5 | |
Para la comparación de los motores entre sí se adopta como referencia el caso 1 (sin saturación) y se compara este con cada uno de los restantes, los valores de comparación se resumen en la tabla 4.
Tabla 4 - Valores relativos al caso de referencia (1)
| Caso | Par arranque | Par máximo | Resbalamiento Par máximo | Corriente arranque |
| 1 | 100 | 100 | 100 | 100 |
| 2 | 167 | 100 | 100 | 128 |
| 3 | 300 | 155 | 200 | 171 |
| 4 | 145 | 115 | 133 | 120 |
| 5 | 162 | 119 | 133 | 126 |
| 6 | 153 | 117 | 133 | 123 |
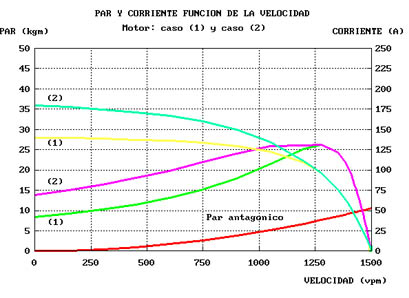
Todas las figuras siguientes muestran las características de par y corriente en función de la velocidad, donde se comparan el caso 1 adoptado como referencia con cada uno de los otros, comentándose a continuación los efectos del fenómeno que se analiza.
En la figura 1 para el caso 2, se observa que a partir de un valor de corriente igual a cuatro veces la nominal se manifiesta saturación en el estator y el rotor.
También debe notarse que aumenta el par de arranque y la corriente de arranque, el par máximo se mantiene pero su valor aparece para un resbalamiento mayor que para el caso 1, en rigor el par que supera un dado valor se produce dentro de un rango mayor de velocidad.
En la figura 2 para el caso 3 la saturación se presenta para una corriente dos veces la nominal, y se observa mayor par y corriente de arranque.
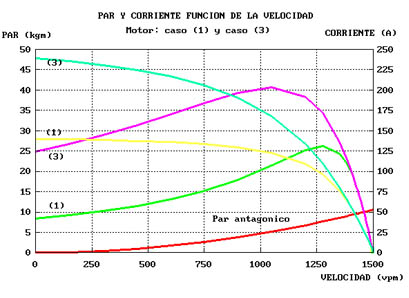
El par máximo es sensiblemente mayor y se desplaza hacia valores superiores del resbalamiento.
En la figura 3 para el caso 4 se presenta sólo saturación en el estator, el rotor no se satura, se observan mayor par de arranque y corriente.
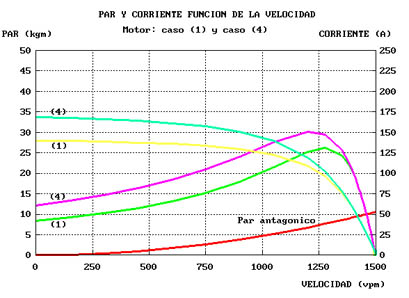
El par máximo se incrementa y se presenta con mayor resbalamiento.
Entre las figuras 2 y 3 se observa la influencia de la saturación en estator y rotor (caso 3) respecto de la sola aparición de saturación en el estator (caso 4).
En la figura 4 para el caso 5 se presenta sólo saturación en el rotor, observándose la similitud con la figura 3 (caso 4) antes citada.
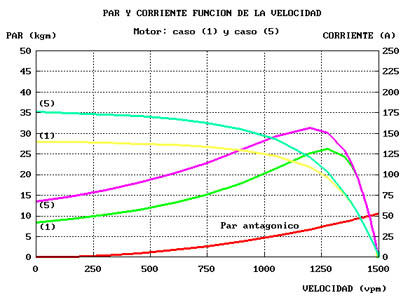
En la figura 5 para el caso 6 se presenta saturación en estator y rotor a partir de dos veces la corriente nominal, pero la parte saturable de la reactancia tanto del estator como del rotor se ha reducido a la mitad para observar la incidencia del fenómeno.
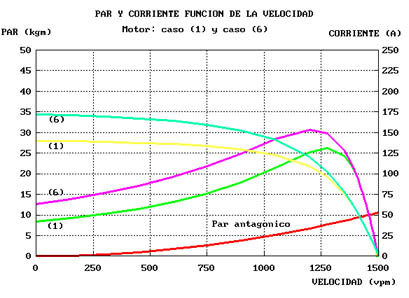
La comparación se debe hacer con la figura 2 para el caso 3, observándose la menor influencia del efecto que se analiza.
Comparando las figuras 3, 4 y 5 se observa que independientemente de que la saturación se presente en el estator o en el rotor, las características de par y corriente dependen esencialmente de la proporción entre la reactancia que se satura (sumando estator y rotor) y la reactancia total.
La tabla 5 muestra para los casos considerados los valores obtenidos y la relación que justifica lo afirmado precedentemente.
Tabla 5 - Influencia de la proporción de saturación
| Caso | XTOTAL | XSAT ESTATOR | XSAT ROTOR | XSAT | XSAT/XTOT |
| ohm | ohm | Ohm | ohm | p.u. | |
| 2, 3 | 1.53 | 0.41 | 0.50 | 0.91 | 0.59 |
| 4 | 1.53 | 0.41 | 0 | 0.41 | 0.27 |
| 5 | 1.53 | 0 | 0.50 | 0.50 | 0.33 |
| 6 | 1.53 | 0.20 | 0.25 | 0.45 | 0.30 |
Comparando los resultados de las simulaciones estudiadas con los datos que se observan en los catálogos de los fabricantes de motores, en particular los valores relativos de par y corriente de arranque, y de par máximo se confirma que el efecto de saturación es aprovechado para lograr características deseadas.
Siguiendo con la comparación de características reales y las correspondientes a los casos estudiados se observa que para el caso 3 correspondiente a un motor de jaula simple saturado, el par de arranque obtenido en la simulación parecería no representativo.
Mientras que para los casos 2, 4, 5 y 6 corresponden características que se observan en catálogos comerciales, por lo que se concluye que la saturación no es utilizada en forma excesiva, es decir se aprovecha el fenómeno pero no se lo lleva al límite, para evitar que la corriente de arranque alcance valores excesivos cuando se alimenta el motor con la tensión nominal.
Simulación de un ensayo con efecto de saturación
En una vieja versión de una norma JIS (Japanese Industrial Standard) para determinar la corriente y el par de arranque consideran dos métodos que se indican a continuación.
1. Proporcionalidad directa con la tensión de ensayo
El ensayo se realiza a corriente nominal, y esta proporcionalidad significa que el motor tiene impedancia constante con la corriente, es decir, que no se satura.

donde:
Iae: corriente arranque de ensayo nominal
Vn: tensión nominal
Ve: tensión de ensayo para la corriente nominal
2. Dependencia logarítmica con la tensión de ensayo
El ensayo se debe realizar a la corriente nominal y al doble de la corriente nominal, midiendo además las tensiones aplicadas correspondientes a estos dos valores de corriente (obsérvese que no se alcanza la tensión nominal).
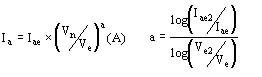
donde:
Iae: corriente arranque de ensayo nominal Ve: tensión de ensayo para la corriente nominal Iae2: corriente de ensayo doble de la nominal Ve2: tensión de ensayo para el doble de la corriente nominal
Se recomienda utilizar este segundo método de cálculo para aquellos motores en los cuales los circuitos de dispersión están fuertemente saturados. Si se aplica este método a un caso sin saturación o un caso en que la saturación se presenta más allá de dos veces la corriente nominal, resulta "a" igual a 1 y se obtiene la fórmula del primer caso (no se observa saturación).
Aplicando el criterio de la norma JIS para el caso de un motor con saturación se ha variado la tensión de alimentación observándose las correspondientes corrientes de arranque (a tensión reducida) y par de arranque.
Tabla 6 - Valores para distinta tensión de alimentación
| Caso | Tensión de alimentación | Corriente de arranque | Par de arranque | Exponente "a" | Corriente calculada | Error |
| (V) | (A) | (kgm) | (A) | (%) | ||
| 7 | 380 | 253.3 | 27.9 | 1.36 | 253 | 0 |
| 8 | 342 | 223.8 | 21.8 | 1.37 | 258 | 1.85 |
| 9 | 266 | 164.7 | 11.8 | 1.40 | 272 | 7.38 |
| 10 | 236 | 141.0 | 8.6 | 1.42 | 277 | 9.36 |
| 11 | 123 | 52.6 | 1.2 | 1.29 | 227 | -10.38 |
| 12 | 108 | 40.1 | 0.7 | 1.02 | 145 | -42.75 |
| 13 | 74 | 27.2 | 0.316 | - | - | - |
Extendiendo la aplicación más allá de lo que fija la norma se puede determinar el exponente "a" entre corriente de arranque de cada caso y la corriente nominal y las tensiones correspondientes, y calcular una corriente de arranque a plena tensión y apreciar el error a medida que se reduce la tensión de alimentación.
Para todos los casos valen los siguientes parámetros de saturación (p.u.)
| X1SATU | C1SATU | XRSATU | CRSATU |
| 0.543 | 1.5 | 0.643 | 1.5 |
Arranque de un motor que se satura con tensión reducida
En la figura 6 para el caso 7 la saturación se presenta tanto en el estator como en el rotor para una corriente una vez y media la nominal.
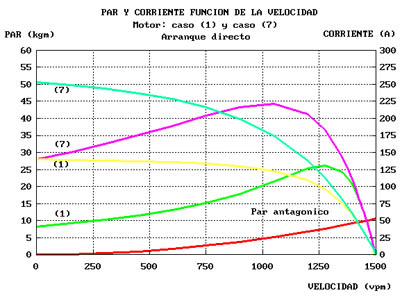
Si comparamos este caso con el 3 de la figura 2 se observa que el par de arranque es 12 % mayor y la corriente de arranque 6 % mayor, es decir que si el motor se satura con una corriente menor (o dicho de otro modo si el efecto de saturación es mayor), aumentan tanto el par como la corriente de arranque, y se incrementa también el par máximo que el motor puede alcanzar.
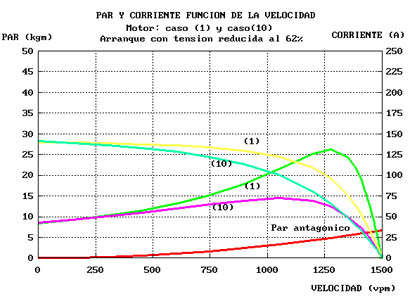
En la figura 7 para el caso 10 las condiciones de saturación son las mismas que para el caso 7 pero se alimenta el motor con tensión reducida al 62 % de la nominal, observándose que el par y la corriente de arranque se reducen y son prácticamente coincidentes con los valores correspondientes al caso 1 (sin saturación) adoptado como referencia para las comparaciones.
Conclusiones
En este trabajo se ponen en evidencia los parámetros que directamente tienen influencia en la magnitud y el comportamiento de las variaciones de las reactancias a rotor bloqueado (arranque) en función de la corriente que el motor absorbe en estas condiciones.
Cuando se quiere aprovechar del efecto de saturación, en la búsqueda de una mejor solución de las características de arranque, se debe actuar variando la geometría de la ranura del estator y/o del rotor, esto afecta en forma ligera las características de funcionamiento en régimen.
La correspondencia entre las prestaciones obtenidas por ensayo, con las que surgen del cálculo requieren conocer en que proporción la saturación afecta las reactancias de dispersión y a partir de que valor de corriente se presenta el fenómeno.
Esto requiere avanzar en forma experimental en el mejoramiento del diseño, no olvidando que las tolerancias de fabricación también afectan los resultados.
Independientemente de que en el diseño no se busque el efecto de saturación, este es un fenómeno que siempre está presente (en mayor o menor medida) y por lo tanto no puede ser despreciado en la determinación de las características de arranque.
Bibliografía
- "Influenza della saturazione dei circuiti magnetici di dispersione sul diagramma delle correnti dei motori asincroni" - L. SIMONI - L'Elettrotecnica agosto 1967.
- IEC 60034-1.
- IEEE Standard Test Procedure for Polyphase Insuction Motors and Generators - IEEE Std 112- 1996. (La norma NEMA No - MG1-1998 hace mención a este documento).
- Calculating Methods of Three-Phase Induction Motor Characteristics - JIS C 4207 1967.
- Motores eléctricos de inducción polifásicos - Métodos de ensayo generales - IRAM 2125 jun. 1958.
- "El motor asincrónico, cálculo y proyecto asistido por computadora" - J. N. L. Sacchi - A. Rifaldi - Revista Electrotécnica - enero/febrero 1986.
- "Cálculo automático de máquinas eléctricas - Avances" J. N. L. Sacchi - A. Rifaldi - Revista Electrotécnica - mayo/junio 1995.

Copyright 2008 - 2012 INDUCOR INGENIERIA S.A. | Todos los derechos reservados | CCS | HTML